mirror of https://github.com/commaai/openpilot.git
parent
cc60fedeba
commit
b1f13418e1
|
|
@ -0,0 +1 @@
|
|||
*.cpp
|
||||
|
|
@ -0,0 +1,6 @@
|
|||
Import('env')
|
||||
|
||||
# parser
|
||||
env.Command(['common_pyx.so'],
|
||||
['common_pyx_setup.py', 'clock.pyx'],
|
||||
"cd common && python3 common_pyx_setup.py build_ext --inplace")
|
||||
|
|
@ -0,0 +1,89 @@
|
|||
import os
|
||||
import binascii
|
||||
import itertools
|
||||
import re
|
||||
import struct
|
||||
import subprocess
|
||||
|
||||
ANDROID = os.path.isfile('/EON')
|
||||
|
||||
def getprop(key):
|
||||
if not ANDROID:
|
||||
return ""
|
||||
return subprocess.check_output(["getprop", key], encoding='utf8').strip()
|
||||
|
||||
def get_imei(slot):
|
||||
slot = str(slot)
|
||||
if slot not in ("0", "1"):
|
||||
raise ValueError("SIM slot must be 0 or 1")
|
||||
|
||||
ret = parse_service_call_string(service_call(["iphonesubinfo", "3" ,"i32", str(slot)]))
|
||||
if not ret:
|
||||
ret = "000000000000000"
|
||||
return ret
|
||||
|
||||
def get_serial():
|
||||
ret = getprop("ro.serialno")
|
||||
if ret == "":
|
||||
ret = "cccccccc"
|
||||
return ret
|
||||
|
||||
def get_subscriber_info():
|
||||
ret = parse_service_call_string(service_call(["iphonesubinfo", "7"]))
|
||||
if ret is None or len(ret) < 8:
|
||||
return ""
|
||||
return ret
|
||||
|
||||
def reboot(reason=None):
|
||||
if reason is None:
|
||||
reason_args = ["null"]
|
||||
else:
|
||||
reason_args = ["s16", reason]
|
||||
|
||||
subprocess.check_output([
|
||||
"service", "call", "power", "16", # IPowerManager.reboot
|
||||
"i32", "0", # no confirmation,
|
||||
*reason_args,
|
||||
"i32", "1" # wait
|
||||
])
|
||||
|
||||
def service_call(call):
|
||||
if not ANDROID:
|
||||
return None
|
||||
|
||||
ret = subprocess.check_output(["service", "call", *call], encoding='utf8').strip()
|
||||
if 'Parcel' not in ret:
|
||||
return None
|
||||
|
||||
return parse_service_call_bytes(ret)
|
||||
|
||||
def parse_service_call_unpack(r, fmt):
|
||||
try:
|
||||
return struct.unpack(fmt, r)[0]
|
||||
except Exception:
|
||||
return None
|
||||
|
||||
def parse_service_call_string(r):
|
||||
try:
|
||||
r = r[8:] # Cut off length field
|
||||
r = r.decode('utf_16_be')
|
||||
|
||||
# All pairs of two characters seem to be swapped. Not sure why
|
||||
result = ""
|
||||
for a, b, in itertools.zip_longest(r[::2], r[1::2], fillvalue='\x00'):
|
||||
result += b + a
|
||||
|
||||
result = result.replace('\x00', '')
|
||||
|
||||
return result
|
||||
except Exception:
|
||||
return None
|
||||
|
||||
def parse_service_call_bytes(ret):
|
||||
try:
|
||||
r = b""
|
||||
for hex_part in re.findall(r'[ (]([0-9a-f]{8})', ret):
|
||||
r += binascii.unhexlify(hex_part)
|
||||
return r
|
||||
except Exception:
|
||||
return None
|
||||
|
|
@ -0,0 +1,42 @@
|
|||
import jwt
|
||||
import requests
|
||||
from datetime import datetime, timedelta
|
||||
|
||||
from selfdrive.version import version
|
||||
|
||||
class Api():
|
||||
def __init__(self, dongle_id):
|
||||
self.dongle_id = dongle_id
|
||||
with open('/persist/comma/id_rsa') as f:
|
||||
self.private_key = f.read()
|
||||
|
||||
def get(self, *args, **kwargs):
|
||||
return self.request('GET', *args, **kwargs)
|
||||
|
||||
def post(self, *args, **kwargs):
|
||||
return self.request('POST', *args, **kwargs)
|
||||
|
||||
def request(self, method, endpoint, timeout=None, access_token=None, **params):
|
||||
return api_get(endpoint, method=method, timeout=timeout, access_token=access_token, **params)
|
||||
|
||||
def get_token(self):
|
||||
now = datetime.utcnow()
|
||||
payload = {
|
||||
'identity': self.dongle_id,
|
||||
'nbf': now,
|
||||
'iat': now,
|
||||
'exp': now + timedelta(hours=1)
|
||||
}
|
||||
return jwt.encode(payload, self.private_key, algorithm='RS256').decode('utf8')
|
||||
|
||||
def api_get(endpoint, method='GET', timeout=None, access_token=None, **params):
|
||||
backend = "https://api.commadotai.com/"
|
||||
|
||||
headers = {}
|
||||
if access_token is not None:
|
||||
headers['Authorization'] = "JWT "+access_token
|
||||
|
||||
headers['User-Agent'] = "openpilot-" + version
|
||||
|
||||
return requests.request(method, backend+endpoint, timeout=timeout, headers = headers, params=params)
|
||||
|
||||
|
|
@ -0,0 +1,98 @@
|
|||
import os
|
||||
import subprocess
|
||||
import glob
|
||||
import hashlib
|
||||
import shutil
|
||||
from common.basedir import BASEDIR
|
||||
from selfdrive.swaglog import cloudlog
|
||||
|
||||
android_packages = ("ai.comma.plus.offroad", "ai.comma.plus.frame")
|
||||
|
||||
def get_installed_apks():
|
||||
dat = subprocess.check_output(["pm", "list", "packages", "-f"], encoding='utf8').strip().split("\n")
|
||||
ret = {}
|
||||
for x in dat:
|
||||
if x.startswith("package:"):
|
||||
v,k = x.split("package:")[1].split("=")
|
||||
ret[k] = v
|
||||
return ret
|
||||
|
||||
def install_apk(path):
|
||||
# can only install from world readable path
|
||||
install_path = "/sdcard/%s" % os.path.basename(path)
|
||||
shutil.copyfile(path, install_path)
|
||||
|
||||
ret = subprocess.call(["pm", "install", "-r", install_path])
|
||||
os.remove(install_path)
|
||||
return ret == 0
|
||||
|
||||
def start_frame():
|
||||
set_package_permissions()
|
||||
system("am start -n ai.comma.plus.frame/.MainActivity")
|
||||
|
||||
def set_package_permissions():
|
||||
pm_grant("ai.comma.plus.offroad", "android.permission.ACCESS_FINE_LOCATION")
|
||||
appops_set("ai.comma.plus.offroad", "SU", "allow")
|
||||
appops_set("ai.comma.plus.offroad", "WIFI_SCAN", "allow")
|
||||
appops_set("ai.comma.plus.offroad", "READ_EXTERNAL_STORAGE", "allow")
|
||||
appops_set("ai.comma.plus.offroad", "WRITE_EXTERNAL_STORAGE", "allow")
|
||||
|
||||
def appops_set(package, op, mode):
|
||||
system(f"LD_LIBRARY_PATH= appops set {package} {op} {mode}")
|
||||
|
||||
def pm_grant(package, permission):
|
||||
system(f"pm grant {package} {permission}")
|
||||
|
||||
def system(cmd):
|
||||
try:
|
||||
cloudlog.info("running %s" % cmd)
|
||||
subprocess.check_output(cmd, stderr=subprocess.STDOUT, shell=True)
|
||||
except subprocess.CalledProcessError as e:
|
||||
cloudlog.event("running failed",
|
||||
cmd=e.cmd,
|
||||
output=e.output[-1024:],
|
||||
returncode=e.returncode)
|
||||
|
||||
# *** external functions ***
|
||||
|
||||
def update_apks():
|
||||
# install apks
|
||||
installed = get_installed_apks()
|
||||
|
||||
install_apks = glob.glob(os.path.join(BASEDIR, "apk/*.apk"))
|
||||
for apk in install_apks:
|
||||
app = os.path.basename(apk)[:-4]
|
||||
if app not in installed:
|
||||
installed[app] = None
|
||||
|
||||
cloudlog.info("installed apks %s" % (str(installed), ))
|
||||
|
||||
for app in installed.keys():
|
||||
apk_path = os.path.join(BASEDIR, "apk/"+app+".apk")
|
||||
if not os.path.exists(apk_path):
|
||||
continue
|
||||
|
||||
h1 = hashlib.sha1(open(apk_path, 'rb').read()).hexdigest()
|
||||
h2 = None
|
||||
if installed[app] is not None:
|
||||
h2 = hashlib.sha1(open(installed[app], 'rb').read()).hexdigest()
|
||||
cloudlog.info("comparing version of %s %s vs %s" % (app, h1, h2))
|
||||
|
||||
if h2 is None or h1 != h2:
|
||||
cloudlog.info("installing %s" % app)
|
||||
|
||||
success = install_apk(apk_path)
|
||||
if not success:
|
||||
cloudlog.info("needing to uninstall %s" % app)
|
||||
system("pm uninstall %s" % app)
|
||||
success = install_apk(apk_path)
|
||||
|
||||
assert success
|
||||
|
||||
def pm_apply_packages(cmd):
|
||||
for p in android_packages:
|
||||
system("pm %s %s" % (cmd, p))
|
||||
|
||||
if __name__ == "__main__":
|
||||
update_apks()
|
||||
|
||||
|
|
@ -0,0 +1,4 @@
|
|||
import os
|
||||
BASEDIR = os.path.abspath(os.path.join(os.path.dirname(os.path.realpath(__file__)), "../"))
|
||||
|
||||
|
||||
|
|
@ -0,0 +1,16 @@
|
|||
from posix.time cimport clock_gettime, timespec, CLOCK_BOOTTIME, CLOCK_MONOTONIC_RAW
|
||||
|
||||
cdef double readclock(int clock_id):
|
||||
cdef timespec ts
|
||||
cdef double current
|
||||
|
||||
clock_gettime(clock_id, &ts)
|
||||
current = ts.tv_sec + (ts.tv_nsec / 1000000000.)
|
||||
return current
|
||||
|
||||
|
||||
def monotonic_time():
|
||||
return readclock(CLOCK_MONOTONIC_RAW)
|
||||
|
||||
def sec_since_boot():
|
||||
return readclock(CLOCK_BOOTTIME)
|
||||
|
|
@ -0,0 +1,150 @@
|
|||
import os
|
||||
import numpy as np
|
||||
import collections
|
||||
from contextlib import closing
|
||||
|
||||
from common.file_helpers import mkdirs_exists_ok
|
||||
|
||||
class ColumnStoreReader():
|
||||
def __init__(self, path, mmap=False, allow_pickle=False, direct_io=False):
|
||||
if not (path and os.path.isdir(path)):
|
||||
raise ValueError("Not a column store: {}".format(path))
|
||||
|
||||
self._path = os.path.realpath(path)
|
||||
self._keys = os.listdir(self._path)
|
||||
self._mmap = mmap
|
||||
self._allow_pickle = allow_pickle
|
||||
self._direct_io = direct_io
|
||||
|
||||
@property
|
||||
def path(self):
|
||||
return self._path
|
||||
|
||||
def close(self):
|
||||
pass
|
||||
|
||||
def get(self, key):
|
||||
try:
|
||||
return self[key]
|
||||
except KeyError:
|
||||
return None
|
||||
|
||||
def keys(self):
|
||||
return list(self._keys)
|
||||
|
||||
def iteritems(self):
|
||||
for k in self:
|
||||
yield (k, self[k])
|
||||
|
||||
def itervalues(self):
|
||||
for k in self:
|
||||
yield self[k]
|
||||
|
||||
def get_npy_path(self, key):
|
||||
"""Gets a filesystem path for an npy file containing the specified array,
|
||||
or none if the column store does not contain key.
|
||||
"""
|
||||
if key in self:
|
||||
return os.path.join(self._path, key)
|
||||
else:
|
||||
return None
|
||||
|
||||
def __getitem__(self, key):
|
||||
try:
|
||||
path = os.path.join(self._path, key)
|
||||
|
||||
# TODO(mgraczyk): This implementation will need to change for zip.
|
||||
if os.path.isdir(path):
|
||||
return ColumnStoreReader(path)
|
||||
else:
|
||||
if self._mmap:
|
||||
# note that direct i/o does nothing for mmap since file read/write interface is not used
|
||||
ret = np.load(path, mmap_mode='r', allow_pickle=self._allow_pickle, fix_imports=False)
|
||||
else:
|
||||
if self._direct_io:
|
||||
opener = lambda path, flags: os.open(path, os.O_RDONLY | os.O_DIRECT)
|
||||
with open(path, 'rb', buffering=0, opener=opener) as f:
|
||||
ret = np.load(f, allow_pickle=self._allow_pickle, fix_imports=False)
|
||||
else:
|
||||
ret = np.load(path, allow_pickle=self._allow_pickle, fix_imports=False)
|
||||
if type(ret) == np.lib.npyio.NpzFile:
|
||||
# if it's saved as compressed, it has arr_0 only in the file. deref this
|
||||
return ret['arr_0']
|
||||
else:
|
||||
return ret
|
||||
except IOError:
|
||||
raise KeyError(key)
|
||||
|
||||
def __contains__(self, item):
|
||||
try:
|
||||
self[item]
|
||||
return True
|
||||
except KeyError:
|
||||
return False
|
||||
|
||||
def __len__(self):
|
||||
return len(self._keys)
|
||||
|
||||
def __bool__(self):
|
||||
return bool(self._keys)
|
||||
|
||||
def __iter__(self):
|
||||
return iter(self._keys)
|
||||
|
||||
def __str__(self):
|
||||
return "ColumnStoreReader({})".format(str({k: "..." for k in self._keys}))
|
||||
|
||||
def __enter__(self): return self
|
||||
def __exit__(self, type, value, traceback): self.close()
|
||||
|
||||
class ColumnStoreWriter():
|
||||
def __init__(self, path, allow_pickle=False):
|
||||
self._path = path
|
||||
self._allow_pickle = allow_pickle
|
||||
mkdirs_exists_ok(self._path)
|
||||
|
||||
def map_column(self, path, dtype, shape):
|
||||
npy_path = os.path.join(self._path, path)
|
||||
mkdirs_exists_ok(os.path.dirname(npy_path))
|
||||
return np.lib.format.open_memmap(npy_path, mode='w+', dtype=dtype, shape=shape)
|
||||
|
||||
def add_column(self, path, data, dtype=None, compression=False, overwrite=False):
|
||||
npy_path = os.path.join(self._path, path)
|
||||
mkdirs_exists_ok(os.path.dirname(npy_path))
|
||||
|
||||
if overwrite:
|
||||
f = open(npy_path, "wb")
|
||||
else:
|
||||
f = os.fdopen(os.open(npy_path, os.O_WRONLY | os.O_CREAT | os.O_EXCL), "wb")
|
||||
|
||||
with closing(f) as f:
|
||||
data2 = np.array(data, copy=False, dtype=dtype)
|
||||
if compression:
|
||||
np.savez_compressed(f, data2)
|
||||
else:
|
||||
np.save(f, data2, allow_pickle=self._allow_pickle, fix_imports=False)
|
||||
|
||||
def add_group(self, group_name):
|
||||
# TODO(mgraczyk): This implementation will need to change if we add zip or compression.
|
||||
return ColumnStoreWriter(os.path.join(self._path, group_name))
|
||||
|
||||
def close(self):
|
||||
pass
|
||||
|
||||
def __enter__(self): return self
|
||||
def __exit__(self, type, value, traceback): self.close()
|
||||
|
||||
|
||||
def _save_dict_as_column_store(values, writer):
|
||||
for k, v in values.items():
|
||||
if isinstance(v, collections.Mapping):
|
||||
_save_dict_as_column_store(v, writer.add_group(k))
|
||||
else:
|
||||
writer.add_column(k, v)
|
||||
|
||||
|
||||
def save_dict_as_column_store(values, output_path):
|
||||
with ColumnStoreWriter(output_path) as writer:
|
||||
_save_dict_as_column_store(values, writer)
|
||||
|
||||
|
||||
|
|
@ -0,0 +1,20 @@
|
|||
from distutils.core import Extension, setup # pylint: disable=import-error,no-name-in-module
|
||||
from Cython.Build import cythonize
|
||||
|
||||
from common.cython_hacks import BuildExtWithoutPlatformSuffix
|
||||
|
||||
sourcefiles = ['clock.pyx']
|
||||
extra_compile_args = ["-std=c++11"]
|
||||
|
||||
setup(name='Common',
|
||||
cmdclass={'build_ext': BuildExtWithoutPlatformSuffix},
|
||||
ext_modules=cythonize(
|
||||
Extension(
|
||||
"common_pyx",
|
||||
language="c++",
|
||||
sources=sourcefiles,
|
||||
extra_compile_args=extra_compile_args,
|
||||
)
|
||||
),
|
||||
nthreads=4,
|
||||
)
|
||||
|
|
@ -0,0 +1,3 @@
|
|||
# py2,3 compatiblity helpers
|
||||
|
||||
basestring = (str, bytes)
|
||||
|
|
@ -0,0 +1,23 @@
|
|||
import os
|
||||
import sysconfig
|
||||
from Cython.Distutils import build_ext
|
||||
|
||||
def get_ext_filename_without_platform_suffix(filename):
|
||||
name, ext = os.path.splitext(filename)
|
||||
ext_suffix = sysconfig.get_config_var('EXT_SUFFIX')
|
||||
|
||||
if ext_suffix == ext:
|
||||
return filename
|
||||
|
||||
ext_suffix = ext_suffix.replace(ext, '')
|
||||
idx = name.find(ext_suffix)
|
||||
|
||||
if idx == -1:
|
||||
return filename
|
||||
else:
|
||||
return name[:idx] + ext
|
||||
|
||||
class BuildExtWithoutPlatformSuffix(build_ext):
|
||||
def get_ext_filename(self, ext_name):
|
||||
filename = super().get_ext_filename(ext_name)
|
||||
return get_ext_filename_without_platform_suffix(filename)
|
||||
|
|
@ -0,0 +1,49 @@
|
|||
import os
|
||||
import sys
|
||||
import fcntl
|
||||
import hashlib
|
||||
from cffi import FFI
|
||||
|
||||
|
||||
def ffi_wrap(name, c_code, c_header, tmpdir="/tmp/ccache", cflags="", libraries=None):
|
||||
if libraries is None:
|
||||
libraries = []
|
||||
|
||||
cache = name + "_" + hashlib.sha1(c_code.encode('utf-8')).hexdigest()
|
||||
try:
|
||||
os.mkdir(tmpdir)
|
||||
except OSError:
|
||||
pass
|
||||
|
||||
fd = os.open(tmpdir, 0)
|
||||
fcntl.flock(fd, fcntl.LOCK_EX)
|
||||
try:
|
||||
sys.path.append(tmpdir)
|
||||
try:
|
||||
mod = __import__(cache)
|
||||
except Exception:
|
||||
print("cache miss {0}".format(cache))
|
||||
compile_code(cache, c_code, c_header, tmpdir, cflags, libraries)
|
||||
mod = __import__(cache)
|
||||
finally:
|
||||
os.close(fd)
|
||||
|
||||
return mod.ffi, mod.lib
|
||||
|
||||
|
||||
def compile_code(name, c_code, c_header, directory, cflags="", libraries=None):
|
||||
if libraries is None:
|
||||
libraries = []
|
||||
|
||||
ffibuilder = FFI()
|
||||
ffibuilder.set_source(name, c_code, source_extension='.cpp', libraries=libraries)
|
||||
ffibuilder.cdef(c_header)
|
||||
os.environ['OPT'] = "-fwrapv -O2 -DNDEBUG -std=c++11"
|
||||
os.environ['CFLAGS'] = cflags
|
||||
ffibuilder.compile(verbose=True, debug=False, tmpdir=directory)
|
||||
|
||||
|
||||
def wrap_compiled(name, directory):
|
||||
sys.path.append(directory)
|
||||
mod = __import__(name)
|
||||
return mod.ffi, mod.lib
|
||||
|
|
@ -0,0 +1,109 @@
|
|||
import os
|
||||
import shutil
|
||||
import tempfile
|
||||
from atomicwrites import AtomicWriter
|
||||
|
||||
def mkdirs_exists_ok(path):
|
||||
try:
|
||||
os.makedirs(path)
|
||||
except OSError:
|
||||
if not os.path.isdir(path):
|
||||
raise
|
||||
|
||||
def rm_not_exists_ok(path):
|
||||
try:
|
||||
os.remove(path)
|
||||
except OSError:
|
||||
if os.path.exists(path):
|
||||
raise
|
||||
|
||||
def rm_tree_or_link(path):
|
||||
if os.path.islink(path):
|
||||
os.unlink(path)
|
||||
elif os.path.isdir(path):
|
||||
shutil.rmtree(path)
|
||||
|
||||
def get_tmpdir_on_same_filesystem(path):
|
||||
normpath = os.path.normpath(path)
|
||||
parts = normpath.split("/")
|
||||
if len(parts) > 1 and parts[1] == "scratch":
|
||||
return "/scratch/tmp"
|
||||
elif len(parts) > 2 and parts[2] == "runner":
|
||||
return "/{}/runner/tmp".format(parts[1])
|
||||
return "/tmp"
|
||||
|
||||
class AutoMoveTempdir():
|
||||
def __init__(self, target_path, temp_dir=None):
|
||||
self._target_path = target_path
|
||||
self._path = tempfile.mkdtemp(dir=temp_dir)
|
||||
|
||||
@property
|
||||
def name(self):
|
||||
return self._path
|
||||
|
||||
def close(self):
|
||||
os.rename(self._path, self._target_path)
|
||||
|
||||
def __enter__(self): return self
|
||||
|
||||
def __exit__(self, type, value, traceback):
|
||||
if type is None:
|
||||
self.close()
|
||||
else:
|
||||
shutil.rmtree(self._path)
|
||||
|
||||
class NamedTemporaryDir():
|
||||
def __init__(self, temp_dir=None):
|
||||
self._path = tempfile.mkdtemp(dir=temp_dir)
|
||||
|
||||
@property
|
||||
def name(self):
|
||||
return self._path
|
||||
|
||||
def close(self):
|
||||
shutil.rmtree(self._path)
|
||||
|
||||
def __enter__(self): return self
|
||||
|
||||
def __exit__(self, type, value, traceback):
|
||||
self.close()
|
||||
|
||||
def _get_fileobject_func(writer, temp_dir):
|
||||
def _get_fileobject():
|
||||
file_obj = writer.get_fileobject(dir=temp_dir)
|
||||
os.chmod(file_obj.name, 0o644)
|
||||
return file_obj
|
||||
return _get_fileobject
|
||||
|
||||
def atomic_write_on_fs_tmp(path, **kwargs):
|
||||
"""Creates an atomic writer using a temporary file in a temporary directory
|
||||
on the same filesystem as path.
|
||||
"""
|
||||
# TODO(mgraczyk): This use of AtomicWriter relies on implementation details to set the temp
|
||||
# directory.
|
||||
writer = AtomicWriter(path, **kwargs)
|
||||
return writer._open(_get_fileobject_func(writer, get_tmpdir_on_same_filesystem(path)))
|
||||
|
||||
|
||||
def atomic_write_in_dir(path, **kwargs):
|
||||
"""Creates an atomic writer using a temporary file in the same directory
|
||||
as the destination file.
|
||||
"""
|
||||
writer = AtomicWriter(path, **kwargs)
|
||||
return writer._open(_get_fileobject_func(writer, os.path.dirname(path)))
|
||||
|
||||
def atomic_write_in_dir_neos(path, contents, mode=None):
|
||||
"""
|
||||
Atomically writes contents to path using a temporary file in the same directory
|
||||
as path. Useful on NEOS, where `os.link` (required by atomic_write_in_dir) is missing.
|
||||
"""
|
||||
|
||||
f = tempfile.NamedTemporaryFile(delete=False, prefix=".tmp", dir=os.path.dirname(path))
|
||||
f.write(contents)
|
||||
f.flush()
|
||||
if mode is not None:
|
||||
os.fchmod(f.fileno(), mode)
|
||||
os.fsync(f.fileno())
|
||||
f.close()
|
||||
|
||||
os.rename(f.name, path)
|
||||
|
|
@ -0,0 +1,10 @@
|
|||
class FirstOrderFilter():
|
||||
# first order filter
|
||||
def __init__(self, x0, ts, dt):
|
||||
self.k = (dt / ts) / (1. + dt / ts)
|
||||
self.x = x0
|
||||
|
||||
def update(self, x):
|
||||
self.x = (1. - self.k) * self.x + self.k * x
|
||||
|
||||
|
||||
|
|
@ -0,0 +1 @@
|
|||
simple_kalman_impl.c
|
||||
|
|
@ -0,0 +1,6 @@
|
|||
Import('env')
|
||||
|
||||
env.Command(['simple_kalman_impl.so'],
|
||||
['simple_kalman_impl.pyx', 'simple_kalman_impl.pxd', 'simple_kalman_setup.py'],
|
||||
"cd common/kalman && python3 simple_kalman_setup.py build_ext --inplace")
|
||||
|
||||
|
|
@ -0,0 +1,3 @@
|
|||
# pylint: skip-file
|
||||
from common.kalman.simple_kalman_impl import KF1D as KF1D
|
||||
assert KF1D
|
||||
|
|
@ -0,0 +1,16 @@
|
|||
cdef class KF1D:
|
||||
cdef public:
|
||||
double x0_0
|
||||
double x1_0
|
||||
double K0_0
|
||||
double K1_0
|
||||
double A0_0
|
||||
double A0_1
|
||||
double A1_0
|
||||
double A1_1
|
||||
double C0_0
|
||||
double C0_1
|
||||
double A_K_0
|
||||
double A_K_1
|
||||
double A_K_2
|
||||
double A_K_3
|
||||
|
|
@ -0,0 +1,36 @@
|
|||
# cython: language_level=3
|
||||
|
||||
cdef class KF1D:
|
||||
def __init__(self, x0, A, C, K):
|
||||
self.x0_0 = x0[0][0]
|
||||
self.x1_0 = x0[1][0]
|
||||
self.A0_0 = A[0][0]
|
||||
self.A0_1 = A[0][1]
|
||||
self.A1_0 = A[1][0]
|
||||
self.A1_1 = A[1][1]
|
||||
self.C0_0 = C[0]
|
||||
self.C0_1 = C[1]
|
||||
self.K0_0 = K[0][0]
|
||||
self.K1_0 = K[1][0]
|
||||
|
||||
self.A_K_0 = self.A0_0 - self.K0_0 * self.C0_0
|
||||
self.A_K_1 = self.A0_1 - self.K0_0 * self.C0_1
|
||||
self.A_K_2 = self.A1_0 - self.K1_0 * self.C0_0
|
||||
self.A_K_3 = self.A1_1 - self.K1_0 * self.C0_1
|
||||
|
||||
def update(self, meas):
|
||||
cdef double x0_0 = self.A_K_0 * self.x0_0 + self.A_K_1 * self.x1_0 + self.K0_0 * meas
|
||||
cdef double x1_0 = self.A_K_2 * self.x0_0 + self.A_K_3 * self.x1_0 + self.K1_0 * meas
|
||||
self.x0_0 = x0_0
|
||||
self.x1_0 = x1_0
|
||||
|
||||
return [self.x0_0, self.x1_0]
|
||||
|
||||
@property
|
||||
def x(self):
|
||||
return [[self.x0_0], [self.x1_0]]
|
||||
|
||||
@x.setter
|
||||
def x(self, x):
|
||||
self.x0_0 = x[0][0]
|
||||
self.x1_0 = x[1][0]
|
||||
|
|
@ -0,0 +1,23 @@
|
|||
import numpy as np
|
||||
|
||||
|
||||
class KF1D:
|
||||
# this EKF assumes constant covariance matrix, so calculations are much simpler
|
||||
# the Kalman gain also needs to be precomputed using the control module
|
||||
|
||||
def __init__(self, x0, A, C, K):
|
||||
self.x = x0
|
||||
self.A = A
|
||||
self.C = C
|
||||
self.K = K
|
||||
|
||||
self.A_K = self.A - np.dot(self.K, self.C)
|
||||
|
||||
# K matrix needs to be pre-computed as follow:
|
||||
# import control
|
||||
# (x, l, K) = control.dare(np.transpose(self.A), np.transpose(self.C), Q, R)
|
||||
# self.K = np.transpose(K)
|
||||
|
||||
def update(self, meas):
|
||||
self.x = np.dot(self.A_K, self.x) + np.dot(self.K, meas)
|
||||
return self.x
|
||||
|
|
@ -0,0 +1,9 @@
|
|||
from distutils.core import Extension, setup
|
||||
|
||||
from Cython.Build import cythonize
|
||||
|
||||
from common.cython_hacks import BuildExtWithoutPlatformSuffix
|
||||
|
||||
setup(name='Simple Kalman Implementation',
|
||||
cmdclass={'build_ext': BuildExtWithoutPlatformSuffix},
|
||||
ext_modules=cythonize(Extension("simple_kalman_impl", ["simple_kalman_impl.pyx"])))
|
||||
|
|
@ -0,0 +1,85 @@
|
|||
import unittest
|
||||
import random
|
||||
import timeit
|
||||
import numpy as np
|
||||
|
||||
from common.kalman.simple_kalman import KF1D
|
||||
from common.kalman.simple_kalman_old import KF1D as KF1D_old
|
||||
|
||||
|
||||
class TestSimpleKalman(unittest.TestCase):
|
||||
def setUp(self):
|
||||
dt = 0.01
|
||||
x0_0 = 0.0
|
||||
x1_0 = 0.0
|
||||
A0_0 = 1.0
|
||||
A0_1 = dt
|
||||
A1_0 = 0.0
|
||||
A1_1 = 1.0
|
||||
C0_0 = 1.0
|
||||
C0_1 = 0.0
|
||||
K0_0 = 0.12287673
|
||||
K1_0 = 0.29666309
|
||||
|
||||
self.kf_old = KF1D_old(x0=np.matrix([[x0_0], [x1_0]]),
|
||||
A=np.matrix([[A0_0, A0_1], [A1_0, A1_1]]),
|
||||
C=np.matrix([C0_0, C0_1]),
|
||||
K=np.matrix([[K0_0], [K1_0]]))
|
||||
|
||||
self.kf = KF1D(x0=[[x0_0], [x1_0]],
|
||||
A=[[A0_0, A0_1], [A1_0, A1_1]],
|
||||
C=[C0_0, C0_1],
|
||||
K=[[K0_0], [K1_0]])
|
||||
|
||||
def test_getter_setter(self):
|
||||
self.kf.x = [[1.0], [1.0]]
|
||||
self.assertEqual(self.kf.x, [[1.0], [1.0]])
|
||||
|
||||
def update_returns_state(self):
|
||||
x = self.kf.update(100)
|
||||
self.assertEqual(x, self.kf.x)
|
||||
|
||||
def test_old_equal_new(self):
|
||||
for _ in range(1000):
|
||||
v_wheel = random.uniform(0, 200)
|
||||
|
||||
x_old = self.kf_old.update(v_wheel)
|
||||
x = self.kf.update(v_wheel)
|
||||
|
||||
# Compare the output x, verify that the error is less than 1e-4
|
||||
self.assertAlmostEqual(x_old[0], x[0])
|
||||
self.assertAlmostEqual(x_old[1], x[1])
|
||||
|
||||
|
||||
def test_new_is_faster(self):
|
||||
setup = """
|
||||
import numpy as np
|
||||
|
||||
from common.kalman.simple_kalman import KF1D
|
||||
from common.kalman.simple_kalman_old import KF1D as KF1D_old
|
||||
|
||||
dt = 0.01
|
||||
x0_0 = 0.0
|
||||
x1_0 = 0.0
|
||||
A0_0 = 1.0
|
||||
A0_1 = dt
|
||||
A1_0 = 0.0
|
||||
A1_1 = 1.0
|
||||
C0_0 = 1.0
|
||||
C0_1 = 0.0
|
||||
K0_0 = 0.12287673
|
||||
K1_0 = 0.29666309
|
||||
|
||||
kf_old = KF1D_old(x0=np.matrix([[x0_0], [x1_0]]),
|
||||
A=np.matrix([[A0_0, A0_1], [A1_0, A1_1]]),
|
||||
C=np.matrix([C0_0, C0_1]),
|
||||
K=np.matrix([[K0_0], [K1_0]]))
|
||||
|
||||
kf = KF1D(x0=[[x0_0], [x1_0]],
|
||||
A=[[A0_0, A0_1], [A1_0, A1_1]],
|
||||
C=[C0_0, C0_1],
|
||||
K=[[K0_0], [K1_0]])
|
||||
"""
|
||||
kf_speed = timeit.timeit("kf.update(1234)", setup=setup, number=10000)
|
||||
kf_old_speed = timeit.timeit("kf_old.update(1234)", setup=setup, number=10000)
|
||||
self.assertTrue(kf_speed < kf_old_speed / 4)
|
||||
|
|
@ -0,0 +1,12 @@
|
|||
class lazy_property():
|
||||
"""Defines a property whose value will be computed only once and as needed.
|
||||
|
||||
This can only be used on instance methods.
|
||||
"""
|
||||
def __init__(self, func):
|
||||
self._func = func
|
||||
|
||||
def __get__(self, obj_self, cls):
|
||||
value = self._func(obj_self)
|
||||
setattr(obj_self, self._func.__name__, value)
|
||||
return value
|
||||
|
|
@ -0,0 +1,284 @@
|
|||
import os
|
||||
import struct
|
||||
import bisect
|
||||
import numpy as np
|
||||
import _io
|
||||
|
||||
import capnp
|
||||
from cereal import log as capnp_log
|
||||
|
||||
class RawData():
|
||||
def __init__(self, f):
|
||||
self.f = _io.FileIO(f, 'rb')
|
||||
self.lenn = struct.unpack("I", self.f.read(4))[0]
|
||||
self.count = os.path.getsize(f) / (self.lenn+4)
|
||||
|
||||
def read(self, i):
|
||||
self.f.seek((self.lenn+4)*i + 4)
|
||||
return self.f.read(self.lenn)
|
||||
|
||||
def yuv420_to_rgb(raw, image_dim=None, swizzled=False):
|
||||
def expand(x):
|
||||
x = np.repeat(x, 2, axis=0)
|
||||
return np.repeat(x, 2, axis=1)
|
||||
|
||||
if image_dim is None:
|
||||
image_dim = (raw.shape[1]*2, raw.shape[2]*2)
|
||||
swizzled = True
|
||||
|
||||
if not swizzled:
|
||||
img_data = np.array(raw, copy=False, dtype=np.uint8)
|
||||
uv_len = (image_dim[0]/2)*(image_dim[1]/2)
|
||||
img_data_u = expand(img_data[image_dim[0]*image_dim[1]: \
|
||||
image_dim[0]*image_dim[1]+uv_len]. \
|
||||
reshape(image_dim[0]/2, image_dim[1]/2))
|
||||
|
||||
img_data_v = expand(img_data[image_dim[0]*image_dim[1]+uv_len: \
|
||||
image_dim[0]*image_dim[1]+2*uv_len]. \
|
||||
reshape(image_dim[0]/2, image_dim[1]/2))
|
||||
img_data_y = img_data[0:image_dim[0]*image_dim[1]].reshape(image_dim)
|
||||
else:
|
||||
img_data_y = np.zeros(image_dim, dtype=np.uint8)
|
||||
img_data_y[0::2, 0::2] = raw[0]
|
||||
img_data_y[1::2, 0::2] = raw[1]
|
||||
img_data_y[0::2, 1::2] = raw[2]
|
||||
img_data_y[1::2, 1::2] = raw[3]
|
||||
img_data_u = expand(raw[4])
|
||||
img_data_v = expand(raw[5])
|
||||
|
||||
yuv = np.stack((img_data_y, img_data_u, img_data_v)).swapaxes(0,2).swapaxes(0,1)
|
||||
yuv = yuv.astype(np.int16)
|
||||
|
||||
# http://maxsharabayko.blogspot.com/2016/01/fast-yuv-to-rgb-conversion-in-python-3.html
|
||||
# according to ITU-R BT.709
|
||||
yuv[:,:, 0] = yuv[:,:, 0].clip(16, 235).astype(yuv.dtype) - 16
|
||||
yuv[:,:,1:] = yuv[:,:,1:].clip(16, 240).astype(yuv.dtype) - 128
|
||||
|
||||
A = np.array([[1.164, 0.000, 1.793],
|
||||
[1.164, -0.213, -0.533],
|
||||
[1.164, 2.112, 0.000]])
|
||||
|
||||
# our result
|
||||
img = np.dot(yuv, A.T).clip(0, 255).astype('uint8')
|
||||
return img
|
||||
|
||||
|
||||
class YuvData():
|
||||
def __init__(self, f, dim=(160,320)):
|
||||
self.f = _io.FileIO(f, 'rb')
|
||||
self.image_dim = dim
|
||||
self.image_size = self.image_dim[0]/2 * self.image_dim[1]/2 * 6
|
||||
self.count = os.path.getsize(f) / self.image_size
|
||||
|
||||
def read_frame(self, frame):
|
||||
self.f.seek(self.image_size*frame)
|
||||
raw = self.f.read(self.image_size)
|
||||
return raw
|
||||
|
||||
def read_frames(self, range_start, range_len):
|
||||
self.f.seek(self.image_size*range_start)
|
||||
raw = self.f.read(self.image_size*range_len)
|
||||
return raw
|
||||
|
||||
def read_frames_into(self, range_start, buf):
|
||||
self.f.seek(self.image_size*range_start)
|
||||
return self.f.readinto(buf)
|
||||
|
||||
def read(self, frame):
|
||||
return yuv420_to_rgb(self.read_frame(frame), self.image_dim)
|
||||
|
||||
def close(self):
|
||||
self.f.close()
|
||||
|
||||
def __enter__(self):
|
||||
return self
|
||||
|
||||
def __exit__(self, type, value, traceback):
|
||||
self.close()
|
||||
|
||||
|
||||
|
||||
class OneReader():
|
||||
def __init__(self, base_path, goofy=False, segment_range=None):
|
||||
self.base_path = base_path
|
||||
|
||||
route_name = os.path.basename(base_path)
|
||||
|
||||
self.rcamera_size = (304, 560)
|
||||
|
||||
if segment_range is None:
|
||||
parent_path = os.path.dirname(base_path)
|
||||
self.segment_nums = []
|
||||
for p in os.listdir(parent_path):
|
||||
if not p.startswith(route_name+"--"):
|
||||
continue
|
||||
self.segment_nums.append(int(p.rsplit("--", 1)[-1]))
|
||||
if not self.segment_nums:
|
||||
raise Exception("no route segments found")
|
||||
self.segment_nums.sort()
|
||||
self.segment_range = (self.segment_nums[0], self.segment_nums[-1])
|
||||
else:
|
||||
self.segment_range = segment_range
|
||||
self.segment_nums = range(segment_range[0], segment_range[1]+1)
|
||||
for i in self.segment_nums:
|
||||
if not os.path.exists(base_path+"--"+str(i)):
|
||||
raise Exception("missing segment in provided range")
|
||||
|
||||
# goofy data is broken with discontinuous logs
|
||||
if goofy and (self.segment_range[0] != 0
|
||||
or self.segment_nums != range(self.segment_range[0], self.segment_range[1]+1)):
|
||||
raise Exception("goofy data needs all the segments for a route")
|
||||
|
||||
self.cur_seg = None
|
||||
self.cur_seg_f = None
|
||||
|
||||
# index the frames
|
||||
print("indexing frames {}...".format(self.segment_nums))
|
||||
|
||||
self.rcamera_encode_map = {} # frame_id -> (segment num, segment id, frame_time)
|
||||
last_frame_id = -1
|
||||
|
||||
if goofy:
|
||||
# goofy is goofy
|
||||
|
||||
frame_size = self.rcamera_size[0]*self.rcamera_size[1]*3/2
|
||||
|
||||
# find the encode id ranges for each segment by using the rcamera file size
|
||||
segment_encode_ids = []
|
||||
cur_encode_id = 0
|
||||
for n in self.segment_nums:
|
||||
camera_path = os.path.join(self.seg_path(n), "rcamera")
|
||||
if not os.path.exists(camera_path):
|
||||
# for goofy, missing camera files means a bad route
|
||||
raise Exception("Missing camera file {}".format(camera_path))
|
||||
camera_size = os.path.getsize(camera_path)
|
||||
assert (camera_size % frame_size) == 0
|
||||
|
||||
num_frames = camera_size / frame_size
|
||||
segment_encode_ids.append(cur_encode_id)
|
||||
cur_encode_id += num_frames
|
||||
|
||||
last_encode_id = -1
|
||||
# use the segment encode id map and frame events to build the frame index
|
||||
for n in self.segment_nums:
|
||||
log_path = os.path.join(self.seg_path(n), "rlog")
|
||||
if os.path.exists(log_path):
|
||||
with open(log_path, "rb") as f:
|
||||
for evt in capnp_log.Event.read_multiple(f):
|
||||
if evt.which() == 'frame':
|
||||
|
||||
if evt.frame.frameId < last_frame_id:
|
||||
# a non-increasing frame id is bad route (eg visiond was restarted)
|
||||
raise Exception("non-increasing frame id")
|
||||
last_frame_id = evt.frame.frameId
|
||||
|
||||
seg_i = bisect.bisect_right(segment_encode_ids, evt.frame.encodeId)-1
|
||||
assert seg_i >= 0
|
||||
seg_num = self.segment_nums[seg_i]
|
||||
seg_id = evt.frame.encodeId-segment_encode_ids[seg_i]
|
||||
frame_time = evt.logMonoTime / 1.0e9
|
||||
|
||||
self.rcamera_encode_map[evt.frame.frameId] = (seg_num, seg_id,
|
||||
frame_time)
|
||||
|
||||
last_encode_id = evt.frame.encodeId
|
||||
|
||||
if last_encode_id-cur_encode_id > 10:
|
||||
# too many missing frames is a bad route (eg route from before encoder rotating worked)
|
||||
raise Exception("goofy route is missing frames: {}, {}".format(
|
||||
last_encode_id, cur_encode_id))
|
||||
|
||||
else:
|
||||
# for harry data, build the index from encodeIdx events
|
||||
for n in self.segment_nums:
|
||||
log_path = os.path.join(self.seg_path(n), "rlog")
|
||||
if os.path.exists(log_path):
|
||||
with open(log_path, "rb") as f:
|
||||
for evt in capnp_log.Event.read_multiple(f):
|
||||
if evt.which() == 'encodeIdx' and evt.encodeIdx.type == 'bigBoxLossless':
|
||||
frame_time = evt.logMonoTime / 1.0e9
|
||||
self.rcamera_encode_map[evt.encodeIdx.frameId] = (
|
||||
evt.encodeIdx.segmentNum, evt.encodeIdx.segmentId,
|
||||
frame_time)
|
||||
|
||||
print("done")
|
||||
|
||||
# read the first event to find the start time
|
||||
self.reset_to_seg(self.segment_range[0])
|
||||
for evt in self.events():
|
||||
if evt.which() != 'initData':
|
||||
self.start_mono = evt.logMonoTime
|
||||
break
|
||||
self.reset_to_seg(self.segment_range[0])
|
||||
|
||||
|
||||
def seg_path(self, num):
|
||||
return self.base_path+"--"+str(num)
|
||||
|
||||
def reset_to_seg(self, seg):
|
||||
self.cur_seg = seg
|
||||
if self.cur_seg_f:
|
||||
self.cur_seg_f.close()
|
||||
self.cur_seg_f = None
|
||||
|
||||
def seek_ts(self, ts):
|
||||
seek_seg = int(ts/60)
|
||||
if seek_seg < self.segment_range[0] or seek_seg > self.segment_range[1]:
|
||||
raise ValueError
|
||||
|
||||
self.reset_to_seg(seek_seg)
|
||||
target_mono = self.start_mono + int(ts*1e9)
|
||||
for evt in self.events():
|
||||
if evt.logMonoTime >= target_mono:
|
||||
break
|
||||
|
||||
def read_event(self):
|
||||
while True:
|
||||
if self.cur_seg > self.segment_range[1]:
|
||||
return None
|
||||
if self.cur_seg_f is None:
|
||||
log_path = os.path.join(self.seg_path(self.cur_seg), "rlog")
|
||||
if not os.path.exists(log_path):
|
||||
print("missing log file!", log_path)
|
||||
self.cur_seg += 1
|
||||
continue
|
||||
self.cur_seg_f = open(log_path, "rb")
|
||||
|
||||
try:
|
||||
return capnp_log.Event.read(self.cur_seg_f)
|
||||
except capnp.lib.capnp.KjException as e:
|
||||
if 'EOF' in str(e): # dumb, but pycapnp does this too
|
||||
self.cur_seg_f.close()
|
||||
self.cur_seg_f = None
|
||||
self.cur_seg += 1
|
||||
else:
|
||||
raise
|
||||
|
||||
def events(self):
|
||||
while True:
|
||||
r = self.read_event()
|
||||
if r is None:
|
||||
break
|
||||
yield r
|
||||
|
||||
def read_frame(self, frame_id):
|
||||
encode_idx = self.rcamera_encode_map.get(frame_id)
|
||||
if encode_idx is None:
|
||||
return None
|
||||
|
||||
seg_num, seg_id, _ = encode_idx
|
||||
camera_path = os.path.join(self.seg_path(seg_num), "rcamera")
|
||||
if not os.path.exists(camera_path):
|
||||
return None
|
||||
with YuvData(camera_path, self.rcamera_size) as data:
|
||||
return data.read_frame(seg_id)
|
||||
|
||||
def close(self):
|
||||
if self.cur_seg_f is not None:
|
||||
self.cur_seg_f.close()
|
||||
|
||||
def __enter__(self):
|
||||
return self
|
||||
|
||||
def __exit__(self, type, value, traceback):
|
||||
self.close()
|
||||
|
|
@ -0,0 +1,92 @@
|
|||
import sys
|
||||
import json
|
||||
# pip2 install msgpack-python
|
||||
import msgpack
|
||||
import zlib
|
||||
import os
|
||||
import logging
|
||||
|
||||
from Crypto.Cipher import AES
|
||||
|
||||
ext = ".gz"
|
||||
SWAG = '\xde\xe2\x11\x15VVC\xf2\x8ep\xd7\xe4\x87\x8d,9'
|
||||
|
||||
def compress_json(in_file, out_file):
|
||||
logging.debug("compressing %s -> %s", in_file, out_file)
|
||||
|
||||
errors = 0
|
||||
|
||||
good = []
|
||||
last_can_time = 0
|
||||
with open(in_file, 'r') as inf:
|
||||
for ln in inf:
|
||||
ln = ln.rstrip()
|
||||
if not ln: continue
|
||||
try:
|
||||
ll = json.loads(ln)
|
||||
except ValueError:
|
||||
errors += 1
|
||||
continue
|
||||
if ll is None or ll[0] is None:
|
||||
continue
|
||||
if ll[0][1] == 1:
|
||||
# no CAN in hex
|
||||
ll[1][2] = ll[1][2].decode("hex")
|
||||
# relativize the CAN timestamps
|
||||
this_can_time = ll[1][1]
|
||||
ll[1] = [ll[1][0], this_can_time - last_can_time, ll[1][2]]
|
||||
last_can_time = this_can_time
|
||||
good.append(ll)
|
||||
|
||||
logging.debug("compressing %s -> %s, read done", in_file, out_file)
|
||||
data = msgpack.packb(good)
|
||||
data_compressed = zlib.compress(data)
|
||||
# zlib doesn't care about this
|
||||
data_compressed += "\x00" * (16 - len(data_compressed)%16)
|
||||
aes = AES.new(SWAG, AES.MODE_CBC, "\x00"*16)
|
||||
data_encrypted = aes.encrypt(data_compressed)
|
||||
with open(out_file, "wb") as outf:
|
||||
outf.write(data_encrypted)
|
||||
|
||||
logging.debug("compressing %s -> %s, write done", in_file, out_file)
|
||||
|
||||
return errors
|
||||
|
||||
def decompress_json_internal(data_encrypted):
|
||||
aes = AES.new(SWAG, AES.MODE_CBC, "\x00"*16)
|
||||
data_compressed = aes.decrypt(data_encrypted)
|
||||
data = zlib.decompress(data_compressed)
|
||||
msgs = msgpack.unpackb(data)
|
||||
good = []
|
||||
last_can_time = 0
|
||||
for ll in msgs:
|
||||
if ll[0][1] == 1:
|
||||
# back into hex
|
||||
ll[1][2] = ll[1][2].encode("hex")
|
||||
# derelativize CAN timestamps
|
||||
last_can_time += ll[1][1]
|
||||
ll[1] = [ll[1][0], last_can_time, ll[1][2]]
|
||||
good.append(ll)
|
||||
return good
|
||||
|
||||
def decompress_json(in_file, out_file):
|
||||
logging.debug("decompressing %s -> %s", in_file, out_file)
|
||||
f = open(in_file)
|
||||
data_encrypted = f.read()
|
||||
f.close()
|
||||
|
||||
good = decompress_json_internal(data_encrypted)
|
||||
out = '\n'.join(map(lambda x: json.dumps(x), good)) + "\n"
|
||||
logging.debug("decompressing %s -> %s, writing", in_file, out_file)
|
||||
f = open(out_file, 'w')
|
||||
f.write(out)
|
||||
f.close()
|
||||
logging.debug("decompressing %s -> %s, write finished", in_file, out_file)
|
||||
|
||||
if __name__ == "__main__":
|
||||
for dat in sys.argv[1:]:
|
||||
print(dat)
|
||||
compress_json(dat, "/tmp/out"+ext)
|
||||
decompress_json("/tmp/out"+ext, "/tmp/test")
|
||||
os.system("diff "+dat+" /tmp/test")
|
||||
|
||||
|
|
@ -0,0 +1,69 @@
|
|||
import logging
|
||||
|
||||
from common.compat import basestring
|
||||
from common.logging_extra import SwagFormatter, json_robust_dumps
|
||||
|
||||
from logstash_async.handler import AsynchronousLogstashHandler
|
||||
from logstash_async.transport import UdpTransport
|
||||
|
||||
# elasticsearch doesnt allow different 'keys' with the different types in the same index
|
||||
|
||||
class SwagLogstashFormatter(SwagFormatter):
|
||||
def __init__(self, swaglogger):
|
||||
super(SwagLogstashFormatter, self).__init__(swaglogger)
|
||||
|
||||
def fix_kv(self, k, v):
|
||||
if isinstance(v, basestring):
|
||||
k += "$s"
|
||||
elif isinstance(v, float):
|
||||
k += "$f"
|
||||
elif isinstance(v, bool):
|
||||
k += "$b"
|
||||
elif isinstance(v, int):
|
||||
k += "$i"
|
||||
elif isinstance(v, dict):
|
||||
nv = {}
|
||||
for ik, iv in v.items():
|
||||
ik, iv = self.fix_kv(ik, iv)
|
||||
nv[ik] = iv
|
||||
v = nv
|
||||
elif isinstance(v, list):
|
||||
k += "$a"
|
||||
return k, v
|
||||
|
||||
def format(self, record):
|
||||
v = self.format_dict(record)
|
||||
|
||||
mk, mv = self.fix_kv('msg', v['msg'])
|
||||
del v['msg']
|
||||
v[mk] = mv
|
||||
|
||||
return json_robust_dumps(v)
|
||||
|
||||
class SwagLogstashHandler(AsynchronousLogstashHandler):
|
||||
def __init__(self, host, port, name, formatter):
|
||||
super(SwagLogstashHandler, self).__init__(host, port, database_path=None, transport=UdpTransport)
|
||||
self.name = name
|
||||
if not isinstance(formatter, SwagLogstashFormatter):
|
||||
raise ValueError("formatter must be swag")
|
||||
self.setFormatter(formatter)
|
||||
|
||||
def emit(self, record):
|
||||
record.name = self.name
|
||||
super(SwagLogstashHandler, self).emit(record)
|
||||
|
||||
if __name__ == "__main__":
|
||||
from common.logging_extra import SwagLogger
|
||||
log = SwagLogger()
|
||||
ls_formatter = SwagLogstashFormatter(log)
|
||||
ls_handler = SwagLogstashHandler("logstash.comma.life", 5040, "pipeline", ls_formatter)
|
||||
log.addHandler(ls_handler)
|
||||
s_handler = logging.StreamHandler()
|
||||
log.addHandler(s_handler)
|
||||
|
||||
log.info("asynclogtest %s", "1")
|
||||
log.info({'asynclogtest': 2})
|
||||
log.warning("asynclogtest warning")
|
||||
log.error("asynclogtest error")
|
||||
log.critical("asynclogtest critical")
|
||||
log.event("asynclogtest", a="b")
|
||||
|
|
@ -0,0 +1,152 @@
|
|||
import os
|
||||
import sys
|
||||
import copy
|
||||
import json
|
||||
import socket
|
||||
import logging
|
||||
from threading import local
|
||||
from collections import OrderedDict
|
||||
from contextlib import contextmanager
|
||||
|
||||
def json_handler(obj):
|
||||
# if isinstance(obj, (datetime.date, datetime.time)):
|
||||
# return obj.isoformat()
|
||||
return repr(obj)
|
||||
|
||||
def json_robust_dumps(obj):
|
||||
return json.dumps(obj, default=json_handler)
|
||||
|
||||
class NiceOrderedDict(OrderedDict):
|
||||
def __str__(self):
|
||||
return json_robust_dumps(self)
|
||||
|
||||
class SwagFormatter(logging.Formatter):
|
||||
def __init__(self, swaglogger):
|
||||
logging.Formatter.__init__(self, None, '%a %b %d %H:%M:%S %Z %Y')
|
||||
|
||||
self.swaglogger = swaglogger
|
||||
self.host = socket.gethostname()
|
||||
|
||||
def format_dict(self, record):
|
||||
record_dict = NiceOrderedDict()
|
||||
|
||||
if isinstance(record.msg, dict):
|
||||
record_dict['msg'] = record.msg
|
||||
else:
|
||||
try:
|
||||
record_dict['msg'] = record.getMessage()
|
||||
except (ValueError, TypeError):
|
||||
record_dict['msg'] = [record.msg]+record.args
|
||||
|
||||
record_dict['ctx'] = self.swaglogger.get_ctx()
|
||||
|
||||
if record.exc_info:
|
||||
record_dict['exc_info'] = self.formatException(record.exc_info)
|
||||
|
||||
record_dict['level'] = record.levelname
|
||||
record_dict['levelnum'] = record.levelno
|
||||
record_dict['name'] = record.name
|
||||
record_dict['filename'] = record.filename
|
||||
record_dict['lineno'] = record.lineno
|
||||
record_dict['pathname'] = record.pathname
|
||||
record_dict['module'] = record.module
|
||||
record_dict['funcName'] = record.funcName
|
||||
record_dict['host'] = self.host
|
||||
record_dict['process'] = record.process
|
||||
record_dict['thread'] = record.thread
|
||||
record_dict['threadName'] = record.threadName
|
||||
record_dict['created'] = record.created
|
||||
|
||||
return record_dict
|
||||
|
||||
def format(self, record):
|
||||
return json_robust_dumps(self.format_dict(record))
|
||||
|
||||
class SwagErrorFilter(logging.Filter):
|
||||
def filter(self, record):
|
||||
return record.levelno < logging.ERROR
|
||||
|
||||
_tmpfunc = lambda: 0
|
||||
_srcfile = os.path.normcase(_tmpfunc.__code__.co_filename)
|
||||
|
||||
class SwagLogger(logging.Logger):
|
||||
def __init__(self):
|
||||
logging.Logger.__init__(self, "swaglog")
|
||||
|
||||
self.global_ctx = {}
|
||||
|
||||
self.log_local = local()
|
||||
self.log_local.ctx = {}
|
||||
|
||||
def local_ctx(self):
|
||||
try:
|
||||
return self.log_local.ctx
|
||||
except AttributeError:
|
||||
self.log_local.ctx = {}
|
||||
return self.log_local.ctx
|
||||
|
||||
def get_ctx(self):
|
||||
return dict(self.local_ctx(), **self.global_ctx)
|
||||
|
||||
@contextmanager
|
||||
def ctx(self, **kwargs):
|
||||
old_ctx = self.local_ctx()
|
||||
self.log_local.ctx = copy.copy(old_ctx) or {}
|
||||
self.log_local.ctx.update(kwargs)
|
||||
try:
|
||||
yield
|
||||
finally:
|
||||
self.log_local.ctx = old_ctx
|
||||
|
||||
def bind(self, **kwargs):
|
||||
self.local_ctx().update(kwargs)
|
||||
|
||||
def bind_global(self, **kwargs):
|
||||
self.global_ctx.update(kwargs)
|
||||
|
||||
def event(self, event_name, *args, **kwargs):
|
||||
evt = NiceOrderedDict()
|
||||
evt['event'] = event_name
|
||||
if args:
|
||||
evt['args'] = args
|
||||
evt.update(kwargs)
|
||||
ctx = self.get_ctx()
|
||||
if ctx:
|
||||
evt['ctx'] = self.get_ctx()
|
||||
if 'error' in kwargs:
|
||||
self.error(evt)
|
||||
else:
|
||||
self.info(evt)
|
||||
|
||||
if __name__ == "__main__":
|
||||
log = SwagLogger()
|
||||
|
||||
stdout_handler = logging.StreamHandler(sys.stdout)
|
||||
stdout_handler.setLevel(logging.INFO)
|
||||
stdout_handler.addFilter(SwagErrorFilter())
|
||||
log.addHandler(stdout_handler)
|
||||
|
||||
stderr_handler = logging.StreamHandler(sys.stderr)
|
||||
stderr_handler.setLevel(logging.ERROR)
|
||||
log.addHandler(stderr_handler)
|
||||
|
||||
log.info("asdasd %s", "a")
|
||||
log.info({'wut': 1})
|
||||
log.warning("warning")
|
||||
log.error("error")
|
||||
log.critical("critical")
|
||||
log.event("test", x="y")
|
||||
|
||||
with log.ctx():
|
||||
stdout_handler.setFormatter(SwagFormatter(log))
|
||||
stderr_handler.setFormatter(SwagFormatter(log))
|
||||
log.bind(user="some user")
|
||||
log.info("in req")
|
||||
print("")
|
||||
log.warning("warning")
|
||||
print("")
|
||||
log.error("error")
|
||||
print("")
|
||||
log.critical("critical")
|
||||
print("")
|
||||
log.event("do_req", a=1, b="c")
|
||||
|
|
@ -0,0 +1,21 @@
|
|||
def int_rnd(x):
|
||||
return int(round(x))
|
||||
|
||||
def clip(x, lo, hi):
|
||||
return max(lo, min(hi, x))
|
||||
|
||||
def interp(x, xp, fp):
|
||||
N = len(xp)
|
||||
def get_interp(xv):
|
||||
hi = 0
|
||||
while hi < N and xv > xp[hi]:
|
||||
hi += 1
|
||||
low = hi - 1
|
||||
return fp[-1] if hi == N and xv > xp[low] else (
|
||||
fp[0] if hi == 0 else
|
||||
(xv - xp[low]) * (fp[hi] - fp[low]) / (xp[hi] - xp[low]) + fp[low])
|
||||
return [get_interp(v) for v in x] if hasattr(
|
||||
x, '__iter__') else get_interp(x)
|
||||
|
||||
def mean(x):
|
||||
return sum(x) / len(x)
|
||||
|
|
@ -0,0 +1,66 @@
|
|||
import bisect
|
||||
import numpy as np
|
||||
from scipy.interpolate import interp1d
|
||||
|
||||
|
||||
def deep_interp_0_fast(dx, x, y):
|
||||
FIX = False
|
||||
if len(y.shape) == 1:
|
||||
y = y[:, None]
|
||||
FIX = True
|
||||
ret = np.zeros((dx.shape[0], y.shape[1]))
|
||||
index = list(x)
|
||||
for i in range(dx.shape[0]):
|
||||
idx = bisect.bisect_left(index, dx[i])
|
||||
if idx == x.shape[0]:
|
||||
idx = x.shape[0] - 1
|
||||
ret[i] = y[idx]
|
||||
|
||||
if FIX:
|
||||
return ret[:, 0]
|
||||
else:
|
||||
return ret
|
||||
|
||||
|
||||
def running_mean(x, N):
|
||||
cumsum = np.cumsum(np.insert(x, [0]*(int(N/2)) + [-1]*(N-int(N/2)), [x[0]]*int(N/2) + [x[-1]]*(N-int(N/2))))
|
||||
return (cumsum[N:] - cumsum[:-N]) / N
|
||||
|
||||
|
||||
def deep_interp_np(x, xp, fp):
|
||||
x = np.atleast_1d(x)
|
||||
xp = np.array(xp)
|
||||
if len(xp) < 2:
|
||||
return np.repeat(fp, len(x), axis=0)
|
||||
if min(np.diff(xp)) < 0:
|
||||
raise RuntimeError('Bad x array for interpolation')
|
||||
j = np.searchsorted(xp, x) - 1
|
||||
j = np.clip(j, 0, len(xp)-2)
|
||||
d = np.divide(x - xp[j], xp[j + 1] - xp[j], out=np.ones_like(x, dtype=np.float64), where=xp[j + 1] - xp[j] != 0)
|
||||
vals_interp = (fp[j].T*(1 - d)).T + (fp[j + 1].T*d).T
|
||||
if len(vals_interp) == 1:
|
||||
return vals_interp[0]
|
||||
else:
|
||||
return vals_interp
|
||||
|
||||
|
||||
def clipping_deep_interp(x, xp, fp):
|
||||
if len(xp) < 2:
|
||||
return deep_interp_np(x, xp, fp)
|
||||
bad_idx = np.where(np.diff(xp) < 0)[0]
|
||||
if len(bad_idx) > 0:
|
||||
if bad_idx[0] ==1:
|
||||
return np.zeros([] + list(fp.shape[1:]))
|
||||
return deep_interp_np(x, xp[:bad_idx[0]], fp[:bad_idx[0]])
|
||||
else:
|
||||
return deep_interp_np(x, xp, fp)
|
||||
|
||||
|
||||
def deep_interp(dx, x, y, kind="slinear"):
|
||||
return interp1d(
|
||||
x, y,
|
||||
axis=0,
|
||||
kind=kind,
|
||||
bounds_error=False,
|
||||
fill_value="extrapolate",
|
||||
assume_sorted=True)(dx)
|
||||
|
|
@ -0,0 +1,409 @@
|
|||
#!/usr/bin/env python3
|
||||
"""ROS has a parameter server, we have files.
|
||||
|
||||
The parameter store is a persistent key value store, implemented as a directory with a writer lock.
|
||||
On Android, we store params under params_dir = /data/params. The writer lock is a file
|
||||
"<params_dir>/.lock" taken using flock(), and data is stored in a directory symlinked to by
|
||||
"<params_dir>/d".
|
||||
|
||||
Each key, value pair is stored as a file with named <key> with contents <value>, located in
|
||||
<params_dir>/d/<key>
|
||||
|
||||
Readers of a single key can just open("<params_dir>/d/<key>") and read the file contents.
|
||||
Readers who want a consistent snapshot of multiple keys should take the lock.
|
||||
|
||||
Writers should take the lock before modifying anything. Writers should also leave the DB in a
|
||||
consistent state after a crash. The implementation below does this by copying all params to a temp
|
||||
directory <params_dir>/<tmp>, then atomically symlinking <params_dir>/<d> to <params_dir>/<tmp>
|
||||
before deleting the old <params_dir>/<d> directory.
|
||||
|
||||
Writers that only modify a single key can simply take the lock, then swap the corresponding value
|
||||
file in place without messing with <params_dir>/d.
|
||||
"""
|
||||
import time
|
||||
import os
|
||||
import errno
|
||||
import sys
|
||||
import shutil
|
||||
import fcntl
|
||||
import tempfile
|
||||
import threading
|
||||
from enum import Enum
|
||||
|
||||
|
||||
def mkdirs_exists_ok(path):
|
||||
try:
|
||||
os.makedirs(path)
|
||||
except OSError:
|
||||
if not os.path.isdir(path):
|
||||
raise
|
||||
|
||||
|
||||
class TxType(Enum):
|
||||
PERSISTENT = 1
|
||||
CLEAR_ON_MANAGER_START = 2
|
||||
CLEAR_ON_PANDA_DISCONNECT = 3
|
||||
|
||||
|
||||
class UnknownKeyName(Exception):
|
||||
pass
|
||||
|
||||
|
||||
keys = {
|
||||
"AccessToken": [TxType.PERSISTENT],
|
||||
"AthenadPid": [TxType.PERSISTENT],
|
||||
"CalibrationParams": [TxType.PERSISTENT],
|
||||
"CarParams": [TxType.CLEAR_ON_MANAGER_START, TxType.CLEAR_ON_PANDA_DISCONNECT],
|
||||
"CarVin": [TxType.CLEAR_ON_MANAGER_START, TxType.CLEAR_ON_PANDA_DISCONNECT],
|
||||
"CommunityFeaturesToggle": [TxType.PERSISTENT],
|
||||
"CompletedTrainingVersion": [TxType.PERSISTENT],
|
||||
"ControlsParams": [TxType.PERSISTENT],
|
||||
"DoUninstall": [TxType.CLEAR_ON_MANAGER_START],
|
||||
"DongleId": [TxType.PERSISTENT],
|
||||
"GitBranch": [TxType.PERSISTENT],
|
||||
"GitCommit": [TxType.PERSISTENT],
|
||||
"GitRemote": [TxType.PERSISTENT],
|
||||
"GithubSshKeys": [TxType.PERSISTENT],
|
||||
"HasAcceptedTerms": [TxType.PERSISTENT],
|
||||
"HasCompletedSetup": [TxType.PERSISTENT],
|
||||
"IsLdwEnabled": [TxType.PERSISTENT],
|
||||
"IsGeofenceEnabled": [TxType.PERSISTENT],
|
||||
"IsMetric": [TxType.PERSISTENT],
|
||||
"IsOffroad": [TxType.CLEAR_ON_MANAGER_START],
|
||||
"IsRHD": [TxType.PERSISTENT],
|
||||
"IsTakingSnapshot": [TxType.CLEAR_ON_MANAGER_START],
|
||||
"IsUpdateAvailable": [TxType.CLEAR_ON_MANAGER_START],
|
||||
"IsUploadRawEnabled": [TxType.PERSISTENT],
|
||||
"LastUpdateTime": [TxType.PERSISTENT],
|
||||
"LimitSetSpeed": [TxType.PERSISTENT],
|
||||
"LimitSetSpeedNeural": [TxType.PERSISTENT],
|
||||
"LiveParameters": [TxType.PERSISTENT],
|
||||
"LongitudinalControl": [TxType.PERSISTENT],
|
||||
"OpenpilotEnabledToggle": [TxType.PERSISTENT],
|
||||
"PandaFirmware": [TxType.CLEAR_ON_MANAGER_START, TxType.CLEAR_ON_PANDA_DISCONNECT],
|
||||
"PandaFirmwareHex": [TxType.CLEAR_ON_MANAGER_START, TxType.CLEAR_ON_PANDA_DISCONNECT],
|
||||
"PandaDongleId": [TxType.CLEAR_ON_MANAGER_START, TxType.CLEAR_ON_PANDA_DISCONNECT],
|
||||
"Passive": [TxType.PERSISTENT],
|
||||
"RecordFront": [TxType.PERSISTENT],
|
||||
"ReleaseNotes": [TxType.PERSISTENT],
|
||||
"ShouldDoUpdate": [TxType.CLEAR_ON_MANAGER_START],
|
||||
"SpeedLimitOffset": [TxType.PERSISTENT],
|
||||
"SubscriberInfo": [TxType.PERSISTENT],
|
||||
"TermsVersion": [TxType.PERSISTENT],
|
||||
"TrainingVersion": [TxType.PERSISTENT],
|
||||
"UpdateAvailable": [TxType.CLEAR_ON_MANAGER_START],
|
||||
"Version": [TxType.PERSISTENT],
|
||||
"Offroad_ChargeDisabled": [TxType.CLEAR_ON_MANAGER_START, TxType.CLEAR_ON_PANDA_DISCONNECT],
|
||||
"Offroad_ConnectivityNeeded": [TxType.CLEAR_ON_MANAGER_START],
|
||||
"Offroad_ConnectivityNeededPrompt": [TxType.CLEAR_ON_MANAGER_START],
|
||||
"Offroad_TemperatureTooHigh": [TxType.CLEAR_ON_MANAGER_START],
|
||||
"Offroad_PandaFirmwareMismatch": [TxType.CLEAR_ON_MANAGER_START, TxType.CLEAR_ON_PANDA_DISCONNECT],
|
||||
"Offroad_InvalidTime": [TxType.CLEAR_ON_MANAGER_START],
|
||||
"Offroad_IsTakingSnapshot": [TxType.CLEAR_ON_MANAGER_START],
|
||||
}
|
||||
|
||||
|
||||
def fsync_dir(path):
|
||||
fd = os.open(path, os.O_RDONLY)
|
||||
try:
|
||||
os.fsync(fd)
|
||||
finally:
|
||||
os.close(fd)
|
||||
|
||||
|
||||
class FileLock():
|
||||
def __init__(self, path, create):
|
||||
self._path = path
|
||||
self._create = create
|
||||
self._fd = None
|
||||
|
||||
def acquire(self):
|
||||
self._fd = os.open(self._path, os.O_CREAT if self._create else 0)
|
||||
fcntl.flock(self._fd, fcntl.LOCK_EX)
|
||||
|
||||
def release(self):
|
||||
if self._fd is not None:
|
||||
os.close(self._fd)
|
||||
self._fd = None
|
||||
|
||||
|
||||
class DBAccessor():
|
||||
def __init__(self, path):
|
||||
self._path = path
|
||||
self._vals = None
|
||||
|
||||
def keys(self):
|
||||
self._check_entered()
|
||||
return self._vals.keys()
|
||||
|
||||
def get(self, key):
|
||||
self._check_entered()
|
||||
try:
|
||||
return self._vals[key]
|
||||
except KeyError:
|
||||
return None
|
||||
|
||||
def _get_lock(self, create):
|
||||
lock = FileLock(os.path.join(self._path, ".lock"), create)
|
||||
lock.acquire()
|
||||
return lock
|
||||
|
||||
def _read_values_locked(self):
|
||||
"""Callers should hold a lock while calling this method."""
|
||||
vals = {}
|
||||
try:
|
||||
data_path = self._data_path()
|
||||
keys = os.listdir(data_path)
|
||||
for key in keys:
|
||||
with open(os.path.join(data_path, key), "rb") as f:
|
||||
vals[key] = f.read()
|
||||
except (OSError, IOError) as e:
|
||||
# Either the DB hasn't been created yet, or somebody wrote a bug and left the DB in an
|
||||
# inconsistent state. Either way, return empty.
|
||||
if e.errno == errno.ENOENT:
|
||||
return {}
|
||||
|
||||
return vals
|
||||
|
||||
def _data_path(self):
|
||||
return os.path.join(self._path, "d")
|
||||
|
||||
def _check_entered(self):
|
||||
if self._vals is None:
|
||||
raise Exception("Must call __enter__ before using DB")
|
||||
|
||||
|
||||
class DBReader(DBAccessor):
|
||||
def __enter__(self):
|
||||
try:
|
||||
lock = self._get_lock(False)
|
||||
except OSError as e:
|
||||
# Do not create lock if it does not exist.
|
||||
if e.errno == errno.ENOENT:
|
||||
self._vals = {}
|
||||
return self
|
||||
|
||||
try:
|
||||
# Read everything.
|
||||
self._vals = self._read_values_locked()
|
||||
return self
|
||||
finally:
|
||||
lock.release()
|
||||
|
||||
def __exit__(self, type, value, traceback): pass
|
||||
|
||||
|
||||
class DBWriter(DBAccessor):
|
||||
def __init__(self, path):
|
||||
super(DBWriter, self).__init__(path)
|
||||
self._lock = None
|
||||
self._prev_umask = None
|
||||
|
||||
def put(self, key, value):
|
||||
self._vals[key] = value
|
||||
|
||||
def delete(self, key):
|
||||
self._vals.pop(key, None)
|
||||
|
||||
def __enter__(self):
|
||||
mkdirs_exists_ok(self._path)
|
||||
|
||||
# Make sure we can write and that permissions are correct.
|
||||
self._prev_umask = os.umask(0)
|
||||
|
||||
try:
|
||||
os.chmod(self._path, 0o777)
|
||||
self._lock = self._get_lock(True)
|
||||
self._vals = self._read_values_locked()
|
||||
except:
|
||||
os.umask(self._prev_umask)
|
||||
self._prev_umask = None
|
||||
raise
|
||||
|
||||
return self
|
||||
|
||||
def __exit__(self, type, value, traceback):
|
||||
self._check_entered()
|
||||
|
||||
try:
|
||||
# data_path refers to the externally used path to the params. It is a symlink.
|
||||
# old_data_path is the path currently pointed to by data_path.
|
||||
# tempdir_path is a path where the new params will go, which the new data path will point to.
|
||||
# new_data_path is a temporary symlink that will atomically overwrite data_path.
|
||||
#
|
||||
# The current situation is:
|
||||
# data_path -> old_data_path
|
||||
# We're going to write params data to tempdir_path
|
||||
# tempdir_path -> params data
|
||||
# Then point new_data_path to tempdir_path
|
||||
# new_data_path -> tempdir_path
|
||||
# Then atomically overwrite data_path with new_data_path
|
||||
# data_path -> tempdir_path
|
||||
old_data_path = None
|
||||
new_data_path = None
|
||||
tempdir_path = tempfile.mkdtemp(prefix=".tmp", dir=self._path)
|
||||
|
||||
try:
|
||||
# Write back all keys.
|
||||
os.chmod(tempdir_path, 0o777)
|
||||
for k, v in self._vals.items():
|
||||
with open(os.path.join(tempdir_path, k), "wb") as f:
|
||||
f.write(v)
|
||||
f.flush()
|
||||
os.fsync(f.fileno())
|
||||
fsync_dir(tempdir_path)
|
||||
|
||||
data_path = self._data_path()
|
||||
try:
|
||||
old_data_path = os.path.join(self._path, os.readlink(data_path))
|
||||
except (OSError, IOError):
|
||||
# NOTE(mgraczyk): If other DB implementations have bugs, this could cause
|
||||
# copies to be left behind, but we still want to overwrite.
|
||||
pass
|
||||
|
||||
new_data_path = "{}.link".format(tempdir_path)
|
||||
os.symlink(os.path.basename(tempdir_path), new_data_path)
|
||||
os.rename(new_data_path, data_path)
|
||||
fsync_dir(self._path)
|
||||
finally:
|
||||
# If the rename worked, we can delete the old data. Otherwise delete the new one.
|
||||
success = new_data_path is not None and os.path.exists(data_path) and (
|
||||
os.readlink(data_path) == os.path.basename(tempdir_path))
|
||||
|
||||
if success:
|
||||
if old_data_path is not None:
|
||||
shutil.rmtree(old_data_path)
|
||||
else:
|
||||
shutil.rmtree(tempdir_path)
|
||||
|
||||
# Regardless of what happened above, there should be no link at new_data_path.
|
||||
if new_data_path is not None and os.path.islink(new_data_path):
|
||||
os.remove(new_data_path)
|
||||
finally:
|
||||
os.umask(self._prev_umask)
|
||||
self._prev_umask = None
|
||||
|
||||
# Always release the lock.
|
||||
self._lock.release()
|
||||
self._lock = None
|
||||
|
||||
|
||||
def read_db(params_path, key):
|
||||
path = "%s/d/%s" % (params_path, key)
|
||||
try:
|
||||
with open(path, "rb") as f:
|
||||
return f.read()
|
||||
except IOError:
|
||||
return None
|
||||
|
||||
def write_db(params_path, key, value):
|
||||
if isinstance(value, str):
|
||||
value = value.encode('utf8')
|
||||
|
||||
prev_umask = os.umask(0)
|
||||
lock = FileLock(params_path+"/.lock", True)
|
||||
lock.acquire()
|
||||
|
||||
try:
|
||||
tmp_path = tempfile.mktemp(prefix=".tmp", dir=params_path)
|
||||
with open(tmp_path, "wb") as f:
|
||||
f.write(value)
|
||||
f.flush()
|
||||
os.fsync(f.fileno())
|
||||
|
||||
path = "%s/d/%s" % (params_path, key)
|
||||
os.rename(tmp_path, path)
|
||||
fsync_dir(os.path.dirname(path))
|
||||
finally:
|
||||
os.umask(prev_umask)
|
||||
lock.release()
|
||||
|
||||
class Params():
|
||||
def __init__(self, db='/data/params'):
|
||||
self.db = db
|
||||
|
||||
# create the database if it doesn't exist...
|
||||
if not os.path.exists(self.db+"/d"):
|
||||
with self.transaction(write=True):
|
||||
pass
|
||||
|
||||
def transaction(self, write=False):
|
||||
if write:
|
||||
return DBWriter(self.db)
|
||||
else:
|
||||
return DBReader(self.db)
|
||||
|
||||
def _clear_keys_with_type(self, tx_type):
|
||||
with self.transaction(write=True) as txn:
|
||||
for key in keys:
|
||||
if tx_type in keys[key]:
|
||||
txn.delete(key)
|
||||
|
||||
def manager_start(self):
|
||||
self._clear_keys_with_type(TxType.CLEAR_ON_MANAGER_START)
|
||||
|
||||
def panda_disconnect(self):
|
||||
self._clear_keys_with_type(TxType.CLEAR_ON_PANDA_DISCONNECT)
|
||||
|
||||
def delete(self, key):
|
||||
with self.transaction(write=True) as txn:
|
||||
txn.delete(key)
|
||||
|
||||
def get(self, key, block=False, encoding=None):
|
||||
if key not in keys:
|
||||
raise UnknownKeyName(key)
|
||||
|
||||
while 1:
|
||||
ret = read_db(self.db, key)
|
||||
if not block or ret is not None:
|
||||
break
|
||||
# is polling really the best we can do?
|
||||
time.sleep(0.05)
|
||||
|
||||
if ret is not None and encoding is not None:
|
||||
ret = ret.decode(encoding)
|
||||
|
||||
return ret
|
||||
|
||||
def put(self, key, dat):
|
||||
"""
|
||||
Warning: This function blocks until the param is written to disk!
|
||||
In very rare cases this can take over a second, and your code will hang.
|
||||
|
||||
Use the put_nonblocking helper function in time sensitive code, but
|
||||
in general try to avoid writing params as much as possible.
|
||||
"""
|
||||
|
||||
if key not in keys:
|
||||
raise UnknownKeyName(key)
|
||||
|
||||
write_db(self.db, key, dat)
|
||||
|
||||
|
||||
def put_nonblocking(key, val):
|
||||
def f(key, val):
|
||||
params = Params()
|
||||
params.put(key, val)
|
||||
|
||||
t = threading.Thread(target=f, args=(key, val))
|
||||
t.start()
|
||||
return t
|
||||
|
||||
|
||||
if __name__ == "__main__":
|
||||
params = Params()
|
||||
if len(sys.argv) > 2:
|
||||
params.put(sys.argv[1], sys.argv[2])
|
||||
else:
|
||||
for k in keys:
|
||||
pp = params.get(k)
|
||||
if pp is None:
|
||||
print("%s is None" % k)
|
||||
elif all(ord(c) < 128 and ord(c) >= 32 for c in pp):
|
||||
print("%s = %s" % (k, pp))
|
||||
else:
|
||||
print("%s = %s" % (k, pp.encode("hex")))
|
||||
|
||||
# Test multiprocess:
|
||||
# seq 0 100000 | xargs -P20 -I{} python common/params.py DongleId {} && sleep 0.05
|
||||
# while python common/params.py DongleId; do sleep 0.05; done
|
||||
|
|
@ -0,0 +1,163 @@
|
|||
#!/usr/bin/env python3
|
||||
|
||||
|
||||
# Copyright (C) 2016 Sixten Bergman
|
||||
# License WTFPL
|
||||
#
|
||||
# This program is free software. It comes without any warranty, to the extent
|
||||
# permitted by applicable law.
|
||||
# You can redistribute it and/or modify it under the terms of the Do What The
|
||||
# Fuck You Want To Public License, Version 2, as published by Sam Hocevar. See
|
||||
# http://www.wtfpl.net/ for more details.
|
||||
#
|
||||
# note that the function peakdetect is derived from code which was released to
|
||||
# public domain see: http://billauer.co.il/peakdet.html
|
||||
#
|
||||
|
||||
from math import log
|
||||
import numpy as np
|
||||
|
||||
__all__ = ["peakdetect"]
|
||||
|
||||
|
||||
|
||||
def _datacheck_peakdetect(x_axis, y_axis):
|
||||
if x_axis is None:
|
||||
x_axis = range(len(y_axis))
|
||||
|
||||
if len(y_axis) != len(x_axis):
|
||||
raise ValueError("Input vectors y_axis and x_axis must have same length")
|
||||
|
||||
#needs to be a numpy array
|
||||
y_axis = np.array(y_axis)
|
||||
x_axis = np.array(x_axis)
|
||||
return x_axis, y_axis
|
||||
|
||||
|
||||
def _pad(fft_data, pad_len):
|
||||
"""
|
||||
Pads fft data to interpolate in time domain
|
||||
|
||||
keyword arguments:
|
||||
fft_data -- the fft
|
||||
pad_len -- By how many times the time resolution should be increased by
|
||||
|
||||
return: padded list
|
||||
"""
|
||||
length = len(fft_data)
|
||||
n = _n(length * pad_len)
|
||||
fft_data = list(fft_data)
|
||||
|
||||
return fft_data[:length // 2] + [0] * (2**n-length) + fft_data[length // 2:]
|
||||
|
||||
|
||||
def _n(x):
|
||||
"""
|
||||
Find the smallest value for n, which fulfils 2**n >= x
|
||||
|
||||
keyword arguments:
|
||||
x -- the value, which 2**n must surpass
|
||||
return: the integer n
|
||||
"""
|
||||
return int(log(x)/log(2)) + 1
|
||||
|
||||
|
||||
def peakdetect(y_axis, x_axis=None, lookahead=200, delta=0):
|
||||
"""
|
||||
Converted from/based on a MATLAB script at:
|
||||
http://billauer.co.il/peakdet.html
|
||||
function for detecting local maxima and minima in a signal.
|
||||
Discovers peaks by searching for values which are surrounded by lower
|
||||
or larger values for maxima and minima respectively
|
||||
keyword arguments:
|
||||
y_axis -- A list containing the signal over which to find peaks
|
||||
x_axis -- A x-axis whose values correspond to the y_axis list and is used
|
||||
in the return to specify the position of the peaks. If omitted an
|
||||
index of the y_axis is used.
|
||||
(default: None)
|
||||
lookahead -- distance to look ahead from a peak candidate to determine if
|
||||
it is the actual peak
|
||||
(default: 200)
|
||||
'(samples / period) / f' where '4 >= f >= 1.25' might be a good value
|
||||
delta -- this specifies a minimum difference between a peak and
|
||||
the following points, before a peak may be considered a peak. Useful
|
||||
to hinder the function from picking up false peaks towards to end of
|
||||
the signal. To work well delta should be set to delta >= RMSnoise * 5.
|
||||
(default: 0)
|
||||
When omitted delta function causes a 20% decrease in speed.
|
||||
When used Correctly it can double the speed of the function
|
||||
return: two lists [max_peaks, min_peaks] containing the positive and
|
||||
negative peaks respectively. Each cell of the lists contains a tuple
|
||||
of: (position, peak_value)
|
||||
to get the average peak value do: np.mean(max_peaks, 0)[1] on the
|
||||
results to unpack one of the lists into x, y coordinates do:
|
||||
x, y = zip(*max_peaks)
|
||||
"""
|
||||
max_peaks = []
|
||||
min_peaks = []
|
||||
dump = [] # Used to pop the first hit which almost always is false
|
||||
# check input data
|
||||
x_axis, y_axis = _datacheck_peakdetect(x_axis, y_axis)
|
||||
# store data length for later use
|
||||
length = len(y_axis)
|
||||
#perform some checks
|
||||
if lookahead < 1:
|
||||
raise ValueError("Lookahead must be '1' or above in value")
|
||||
if not (np.isscalar(delta) and delta >= 0):
|
||||
raise ValueError("delta must be a positive number")
|
||||
#maxima and minima candidates are temporarily stored in
|
||||
#mx and mn respectively
|
||||
mn, mx = np.Inf, -np.Inf
|
||||
#Only detect peak if there is 'lookahead' amount of points after it
|
||||
for index, (x, y) in enumerate(zip(x_axis[:-lookahead],
|
||||
y_axis[:-lookahead])):
|
||||
if y > mx:
|
||||
mx = y
|
||||
mxpos = x
|
||||
if y < mn:
|
||||
mn = y
|
||||
mnpos = x
|
||||
####look for max####
|
||||
if y < mx-delta and mx != np.Inf:
|
||||
#Maxima peak candidate found
|
||||
#look ahead in signal to ensure that this is a peak and not jitter
|
||||
if y_axis[index:index+lookahead].max() < mx:
|
||||
max_peaks.append([mxpos, mx])
|
||||
dump.append(True)
|
||||
#set algorithm to only find minima now
|
||||
mx = np.Inf
|
||||
mn = np.Inf
|
||||
if index+lookahead >= length:
|
||||
#end is within lookahead no more peaks can be found
|
||||
break
|
||||
continue
|
||||
#else: #slows shit down this does
|
||||
# mx = ahead
|
||||
# mxpos = x_axis[np.where(y_axis[index:index+lookahead]==mx)]
|
||||
####look for min####
|
||||
if y > mn+delta and mn != -np.Inf:
|
||||
#Minima peak candidate found
|
||||
#look ahead in signal to ensure that this is a peak and not jitter
|
||||
if y_axis[index:index+lookahead].min() > mn:
|
||||
min_peaks.append([mnpos, mn])
|
||||
dump.append(False)
|
||||
#set algorithm to only find maxima now
|
||||
mn = -np.Inf
|
||||
mx = -np.Inf
|
||||
if index+lookahead >= length:
|
||||
#end is within lookahead no more peaks can be found
|
||||
break
|
||||
#else: #slows shit down this does
|
||||
# mn = ahead
|
||||
# mnpos = x_axis[np.where(y_axis[index:index+lookahead]==mn)]
|
||||
#Remove the false hit on the first value of the y_axis
|
||||
try:
|
||||
if dump[0]:
|
||||
max_peaks.pop(0)
|
||||
else:
|
||||
min_peaks.pop(0)
|
||||
del dump
|
||||
except IndexError:
|
||||
#no peaks were found, should the function return empty lists?
|
||||
pass
|
||||
return [max_peaks, min_peaks]
|
||||
|
|
@ -0,0 +1,46 @@
|
|||
import time
|
||||
|
||||
class Profiler():
|
||||
def __init__(self, enabled=False):
|
||||
self.enabled = enabled
|
||||
self.cp = {}
|
||||
self.cp_ignored = []
|
||||
self.iter = 0
|
||||
self.start_time = time.time()
|
||||
self.last_time = self.start_time
|
||||
self.tot = 0.
|
||||
|
||||
def reset(self, enabled=False):
|
||||
self.enabled = enabled
|
||||
self.cp = {}
|
||||
self.cp_ignored = []
|
||||
self.iter = 0
|
||||
self.start_time = time.time()
|
||||
self.last_time = self.start_time
|
||||
|
||||
def checkpoint(self, name, ignore=False):
|
||||
# ignore flag needed when benchmarking threads with ratekeeper
|
||||
if not self.enabled:
|
||||
return
|
||||
tt = time.time()
|
||||
if name not in self.cp:
|
||||
self.cp[name] = 0.
|
||||
if ignore:
|
||||
self.cp_ignored.append(name)
|
||||
self.cp[name] += tt - self.last_time
|
||||
if not ignore:
|
||||
self.tot += tt - self.last_time
|
||||
self.last_time = tt
|
||||
|
||||
def display(self):
|
||||
if not self.enabled:
|
||||
return
|
||||
self.iter += 1
|
||||
print("******* Profiling *******")
|
||||
for n, ms in sorted(self.cp.items(), key=lambda x: -x[1]):
|
||||
if n in self.cp_ignored:
|
||||
print("%30s: %7.2f percent: %3.0f IGNORED" % (n, ms*1000.0, ms/self.tot*100))
|
||||
else:
|
||||
print("%30s: %7.2f percent: %3.0f" % (n, ms*1000.0, ms/self.tot*100))
|
||||
print("Iter clock: %2.6f TOTAL: %2.2f" % (self.tot/self.iter, self.tot))
|
||||
|
||||
|
|
@ -0,0 +1,74 @@
|
|||
"""Utilities for reading real time clocks and keeping soft real time constraints."""
|
||||
import os
|
||||
import time
|
||||
import platform
|
||||
import subprocess
|
||||
import multiprocessing
|
||||
from cffi import FFI
|
||||
|
||||
from common.common_pyx import sec_since_boot # pylint: disable=no-name-in-module, import-error
|
||||
|
||||
|
||||
# time step for each process
|
||||
DT_CTRL = 0.01 # controlsd
|
||||
DT_MDL = 0.05 # model
|
||||
DT_DMON = 0.1 # driver monitoring
|
||||
DT_TRML = 0.5 # thermald and manager
|
||||
|
||||
|
||||
ffi = FFI()
|
||||
ffi.cdef("long syscall(long number, ...);")
|
||||
libc = ffi.dlopen(None)
|
||||
|
||||
|
||||
def set_realtime_priority(level):
|
||||
if os.getuid() != 0:
|
||||
print("not setting priority, not root")
|
||||
return
|
||||
if platform.machine() == "x86_64":
|
||||
NR_gettid = 186
|
||||
elif platform.machine() == "aarch64":
|
||||
NR_gettid = 178
|
||||
else:
|
||||
raise NotImplementedError
|
||||
|
||||
tid = libc.syscall(NR_gettid)
|
||||
return subprocess.call(['chrt', '-f', '-p', str(level), str(tid)])
|
||||
|
||||
|
||||
class Ratekeeper():
|
||||
def __init__(self, rate, print_delay_threshold=0.):
|
||||
"""Rate in Hz for ratekeeping. print_delay_threshold must be nonnegative."""
|
||||
self._interval = 1. / rate
|
||||
self._next_frame_time = sec_since_boot() + self._interval
|
||||
self._print_delay_threshold = print_delay_threshold
|
||||
self._frame = 0
|
||||
self._remaining = 0
|
||||
self._process_name = multiprocessing.current_process().name
|
||||
|
||||
@property
|
||||
def frame(self):
|
||||
return self._frame
|
||||
|
||||
@property
|
||||
def remaining(self):
|
||||
return self._remaining
|
||||
|
||||
# Maintain loop rate by calling this at the end of each loop
|
||||
def keep_time(self):
|
||||
lagged = self.monitor_time()
|
||||
if self._remaining > 0:
|
||||
time.sleep(self._remaining)
|
||||
return lagged
|
||||
|
||||
# this only monitor the cumulative lag, but does not enforce a rate
|
||||
def monitor_time(self):
|
||||
lagged = False
|
||||
remaining = self._next_frame_time - sec_since_boot()
|
||||
self._next_frame_time += self._interval
|
||||
if self._print_delay_threshold is not None and remaining < -self._print_delay_threshold:
|
||||
print("%s lagging by %.2f ms" % (self._process_name, -remaining * 1000))
|
||||
lagged = True
|
||||
self._frame += 1
|
||||
self._remaining = remaining
|
||||
return lagged
|
||||
|
|
@ -0,0 +1,78 @@
|
|||
import os
|
||||
import numpy as np
|
||||
import random
|
||||
|
||||
class SamplingBuffer():
|
||||
def __init__(self, fn, size, write=False):
|
||||
self._fn = fn
|
||||
self._write = write
|
||||
if self._write:
|
||||
self._f = open(self._fn, "ab")
|
||||
else:
|
||||
self._f = open(self._fn, "rb")
|
||||
self._size = size
|
||||
self._refresh()
|
||||
|
||||
def _refresh(self):
|
||||
self.cnt = os.path.getsize(self._fn) / self._size
|
||||
|
||||
@property
|
||||
def count(self):
|
||||
self._refresh()
|
||||
return self.cnt
|
||||
|
||||
def _fetch_one(self, x):
|
||||
assert self._write == False
|
||||
self._f.seek(x*self._size)
|
||||
return self._f.read(self._size)
|
||||
|
||||
def sample(self, count, indices = None):
|
||||
if indices == None:
|
||||
cnt = self.count
|
||||
assert cnt != 0
|
||||
indices = map(lambda x: random.randint(0, cnt-1), range(count))
|
||||
return map(self._fetch_one, indices)
|
||||
|
||||
def write(self, dat):
|
||||
assert self._write == True
|
||||
assert (len(dat) % self._size) == 0
|
||||
self._f.write(dat)
|
||||
self._f.flush()
|
||||
|
||||
class NumpySamplingBuffer():
|
||||
def __init__(self, fn, size, dtype, write=False):
|
||||
self._size = size
|
||||
self._dtype = dtype
|
||||
self._buf = SamplingBuffer(fn, len(np.zeros(size, dtype=dtype).tobytes()), write)
|
||||
|
||||
@property
|
||||
def count(self):
|
||||
return self._buf.count
|
||||
|
||||
def write(self, dat):
|
||||
self._buf.write(dat.tobytes())
|
||||
|
||||
def sample(self, count, indices = None):
|
||||
return np.fromstring(''.join(self._buf.sample(count, indices)), dtype=self._dtype).reshape([count]+list(self._size))
|
||||
|
||||
# TODO: n IOPS needed where n is the Multi
|
||||
class MultiNumpySamplingBuffer():
|
||||
def __init__(self, fn, npa, write=False):
|
||||
self._bufs = []
|
||||
for i,n in enumerate(npa):
|
||||
self._bufs.append(NumpySamplingBuffer(fn + ("_%d" % i), n[0], n[1], write))
|
||||
|
||||
def write(self, dat):
|
||||
for b,x in zip(self._bufs, dat):
|
||||
b.write(x)
|
||||
|
||||
@property
|
||||
def count(self):
|
||||
return min(map(lambda x: x.count, self._bufs))
|
||||
|
||||
def sample(self, count):
|
||||
cnt = self.count
|
||||
assert cnt != 0
|
||||
indices = map(lambda x: random.randint(0, cnt-1), range(count))
|
||||
return map(lambda x: x.sample(count, indices), self._bufs)
|
||||
|
||||
|
|
@ -0,0 +1,63 @@
|
|||
import os
|
||||
import subprocess
|
||||
from common.basedir import BASEDIR
|
||||
|
||||
|
||||
class Spinner():
|
||||
def __init__(self):
|
||||
try:
|
||||
self.spinner_proc = subprocess.Popen(["./spinner"],
|
||||
stdin=subprocess.PIPE,
|
||||
cwd=os.path.join(BASEDIR, "selfdrive", "ui", "spinner"),
|
||||
close_fds=True)
|
||||
except OSError:
|
||||
self.spinner_proc = None
|
||||
|
||||
def __enter__(self):
|
||||
return self
|
||||
|
||||
def update(self, spinner_text):
|
||||
if self.spinner_proc is not None:
|
||||
self.spinner_proc.stdin.write(spinner_text.encode('utf8') + b"\n")
|
||||
try:
|
||||
self.spinner_proc.stdin.flush()
|
||||
except BrokenPipeError:
|
||||
pass
|
||||
|
||||
def close(self):
|
||||
if self.spinner_proc is not None:
|
||||
try:
|
||||
self.spinner_proc.stdin.close()
|
||||
except BrokenPipeError:
|
||||
pass
|
||||
self.spinner_proc.terminate()
|
||||
self.spinner_proc = None
|
||||
|
||||
def __del__(self):
|
||||
self.close()
|
||||
|
||||
def __exit__(self, type, value, traceback):
|
||||
self.close()
|
||||
|
||||
|
||||
class FakeSpinner():
|
||||
def __init__(self):
|
||||
pass
|
||||
|
||||
def __enter__(self):
|
||||
return self
|
||||
|
||||
def update(self, _):
|
||||
pass
|
||||
|
||||
def __exit__(self, type, value, traceback):
|
||||
pass
|
||||
|
||||
|
||||
if __name__ == "__main__":
|
||||
import time
|
||||
with Spinner() as s:
|
||||
s.update("Spinner text")
|
||||
time.sleep(5.0)
|
||||
print("gone")
|
||||
time.sleep(5.0)
|
||||
|
|
@ -0,0 +1,73 @@
|
|||
import numpy as np
|
||||
|
||||
class RunningStat():
|
||||
# tracks realtime mean and standard deviation without storing any data
|
||||
def __init__(self, priors=None, max_trackable=-1):
|
||||
self.max_trackable = max_trackable
|
||||
if priors is not None:
|
||||
# initialize from history
|
||||
self.M = priors[0]
|
||||
self.S = priors[1]
|
||||
self.n = priors[2]
|
||||
self.M_last = self.M
|
||||
self.S_last = self.S
|
||||
|
||||
else:
|
||||
self.reset()
|
||||
|
||||
def reset(self):
|
||||
self.M = 0.
|
||||
self.S = 0.
|
||||
self.M_last = 0.
|
||||
self.S_last = 0.
|
||||
self.n = 0
|
||||
|
||||
def push_data(self, new_data):
|
||||
# short term memory hack
|
||||
if self.max_trackable < 0 or self.n < self.max_trackable:
|
||||
self.n += 1
|
||||
if self.n == 0:
|
||||
self.M_last = new_data
|
||||
self.M = self.M_last
|
||||
self.S_last = 0.
|
||||
else:
|
||||
self.M = self.M_last + (new_data - self.M_last) / self.n
|
||||
self.S = self.S_last + (new_data - self.M_last) * (new_data - self.M);
|
||||
self.M_last = self.M
|
||||
self.S_last = self.S
|
||||
|
||||
def mean(self):
|
||||
return self.M
|
||||
|
||||
def variance(self):
|
||||
if self.n >= 2:
|
||||
return self.S / (self.n - 1.)
|
||||
else:
|
||||
return 0
|
||||
|
||||
def std(self):
|
||||
return np.sqrt(self.variance())
|
||||
|
||||
def params_to_save(self):
|
||||
return [self.M, self.S, self.n]
|
||||
|
||||
class RunningStatFilter():
|
||||
def __init__(self, raw_priors=None, filtered_priors=None, max_trackable=-1):
|
||||
self.raw_stat = RunningStat(raw_priors, max_trackable)
|
||||
self.filtered_stat = RunningStat(filtered_priors, max_trackable)
|
||||
|
||||
def reset(self):
|
||||
self.raw_stat.reset()
|
||||
self.filtered_stat.reset()
|
||||
|
||||
def push_and_update(self, new_data):
|
||||
_std_last = self.raw_stat.std()
|
||||
self.raw_stat.push_data(new_data)
|
||||
_delta_std = self.raw_stat.std() - _std_last
|
||||
if _delta_std<=0:
|
||||
self.filtered_stat.push_data(new_data)
|
||||
else:
|
||||
pass
|
||||
# self.filtered_stat.push_data(self.filtered_stat.mean())
|
||||
|
||||
# class SequentialBayesian():
|
||||
|
|
@ -0,0 +1,94 @@
|
|||
import numpy as np
|
||||
|
||||
_DESC_FMT = """
|
||||
{} (n={}):
|
||||
MEAN={}
|
||||
VAR={}
|
||||
MIN={}
|
||||
MAX={}
|
||||
"""
|
||||
|
||||
class StatTracker():
|
||||
def __init__(self, name):
|
||||
self._name = name
|
||||
self._mean = 0.
|
||||
self._var = 0.
|
||||
self._n = 0
|
||||
self._min = -float("-inf")
|
||||
self._max = -float("inf")
|
||||
|
||||
@property
|
||||
def mean(self):
|
||||
return self._mean
|
||||
|
||||
@property
|
||||
def var(self):
|
||||
return (self._n * self._var) / (self._n - 1.)
|
||||
|
||||
@property
|
||||
def min(self):
|
||||
return self._min
|
||||
|
||||
@property
|
||||
def max(self):
|
||||
return self._max
|
||||
|
||||
def update(self, samples):
|
||||
# https://en.wikipedia.org/wiki/Algorithms_for_calculating_variance#Parallel_algorithm
|
||||
data = samples.reshape(-1)
|
||||
n_a = data.size
|
||||
mean_a = np.mean(data)
|
||||
var_a = np.var(data, ddof=0)
|
||||
|
||||
n_b = self._n
|
||||
mean_b = self._mean
|
||||
|
||||
delta = mean_b - mean_a
|
||||
m_a = var_a * (n_a - 1)
|
||||
m_b = self._var * (n_b - 1)
|
||||
m2 = m_a + m_b + delta**2 * n_a * n_b / (n_a + n_b)
|
||||
|
||||
self._var = m2 / (n_a + n_b)
|
||||
self._mean = (n_a * mean_a + n_b * mean_b) / (n_a + n_b)
|
||||
self._n = n_a + n_b
|
||||
|
||||
self._min = min(self._min, np.min(data))
|
||||
self._max = max(self._max, np.max(data))
|
||||
|
||||
def __str__(self):
|
||||
return _DESC_FMT.format(self._name, self._n, self._mean, self.var, self._min,
|
||||
self._max)
|
||||
|
||||
# FIXME(mgraczyk): The variance computation does not work with 1 sample batches.
|
||||
class VectorStatTracker(StatTracker):
|
||||
def __init__(self, name, dim):
|
||||
self._name = name
|
||||
self._mean = np.zeros((dim, ))
|
||||
self._var = np.zeros((dim, dim))
|
||||
self._n = 0
|
||||
self._min = np.full((dim, ), -float("-inf"))
|
||||
self._max = np.full((dim, ), -float("inf"))
|
||||
|
||||
@property
|
||||
def cov(self):
|
||||
return self.var
|
||||
|
||||
def update(self, samples):
|
||||
n_a = samples.shape[0]
|
||||
mean_a = np.mean(samples, axis=0)
|
||||
var_a = np.cov(samples, ddof=0, rowvar=False)
|
||||
|
||||
n_b = self._n
|
||||
mean_b = self._mean
|
||||
|
||||
delta = mean_b - mean_a
|
||||
m_a = var_a * (n_a - 1)
|
||||
m_b = self._var * (n_b - 1)
|
||||
m2 = m_a + m_b + delta**2 * n_a * n_b / (n_a + n_b)
|
||||
|
||||
self._var = m2 / (n_a + n_b)
|
||||
self._mean = (n_a * mean_a + n_b * mean_b) / (n_a + n_b)
|
||||
self._n = n_a + n_b
|
||||
|
||||
self._min = np.minimum(self._min, np.min(samples, axis=0))
|
||||
self._max = np.maximum(self._max, np.max(samples, axis=0))
|
||||
|
|
@ -0,0 +1,6 @@
|
|||
def replace_right(s, old, new, occurrence):
|
||||
# replace_right('1232425', '2', ' ', 1) -> '12324 5'
|
||||
# replace_right('1232425', '2', ' ', 2) -> '123 4 5'
|
||||
|
||||
split = s.rsplit(old, occurrence)
|
||||
return new.join(split)
|
||||
|
|
@ -0,0 +1,81 @@
|
|||
#!/usr/bin/env python3
|
||||
import sympy as sp
|
||||
import numpy as np
|
||||
|
||||
def cross(x):
|
||||
ret = sp.Matrix(np.zeros((3,3)))
|
||||
ret[0,1], ret[0,2] = -x[2], x[1]
|
||||
ret[1,0], ret[1,2] = x[2], -x[0]
|
||||
ret[2,0], ret[2,1] = -x[1], x[0]
|
||||
return ret
|
||||
|
||||
def euler_rotate(roll, pitch, yaw):
|
||||
# make symbolic rotation matrix from eulers
|
||||
matrix_roll = sp.Matrix([[1, 0, 0],
|
||||
[0, sp.cos(roll), -sp.sin(roll)],
|
||||
[0, sp.sin(roll), sp.cos(roll)]])
|
||||
matrix_pitch = sp.Matrix([[sp.cos(pitch), 0, sp.sin(pitch)],
|
||||
[0, 1, 0],
|
||||
[-sp.sin(pitch), 0, sp.cos(pitch)]])
|
||||
matrix_yaw = sp.Matrix([[sp.cos(yaw), -sp.sin(yaw), 0],
|
||||
[sp.sin(yaw), sp.cos(yaw), 0],
|
||||
[0, 0, 1]])
|
||||
return matrix_yaw*matrix_pitch*matrix_roll
|
||||
|
||||
def quat_rotate(q0, q1, q2, q3):
|
||||
# make symbolic rotation matrix from quat
|
||||
return sp.Matrix([[q0**2 + q1**2 - q2**2 - q3**2, 2*(q1*q2 + q0*q3), 2*(q1*q3 - q0*q2)],
|
||||
[2*(q1*q2 - q0*q3), q0**2 - q1**2 + q2**2 - q3**2, 2*(q2*q3 + q0*q1)],
|
||||
[2*(q1*q3 + q0*q2), 2*(q2*q3 - q0*q1), q0**2 - q1**2 - q2**2 + q3**2]]).T
|
||||
|
||||
def quat_matrix_l(p):
|
||||
return sp.Matrix([[p[0], -p[1], -p[2], -p[3]],
|
||||
[p[1], p[0], -p[3], p[2]],
|
||||
[p[2], p[3], p[0], -p[1]],
|
||||
[p[3], -p[2], p[1], p[0]]])
|
||||
|
||||
def quat_matrix_r(p):
|
||||
return sp.Matrix([[p[0], -p[1], -p[2], -p[3]],
|
||||
[p[1], p[0], p[3], -p[2]],
|
||||
[p[2], -p[3], p[0], p[1]],
|
||||
[p[3], p[2], -p[1], p[0]]])
|
||||
|
||||
|
||||
def sympy_into_c(sympy_functions):
|
||||
from sympy.utilities import codegen
|
||||
routines = []
|
||||
for name, expr, args in sympy_functions:
|
||||
r = codegen.make_routine(name, expr, language="C99")
|
||||
|
||||
# argument ordering input to sympy is broken with function with output arguments
|
||||
nargs = []
|
||||
# reorder the input arguments
|
||||
for aa in args:
|
||||
if aa is None:
|
||||
nargs.append(codegen.InputArgument(sp.Symbol('unused'), dimensions=[1,1]))
|
||||
continue
|
||||
found = False
|
||||
for a in r.arguments:
|
||||
if str(aa.name) == str(a.name):
|
||||
nargs.append(a)
|
||||
found = True
|
||||
break
|
||||
if not found:
|
||||
# [1,1] is a hack for Matrices
|
||||
nargs.append(codegen.InputArgument(aa, dimensions=[1,1]))
|
||||
# add the output arguments
|
||||
for a in r.arguments:
|
||||
if type(a) == codegen.OutputArgument:
|
||||
nargs.append(a)
|
||||
|
||||
#assert len(r.arguments) == len(args)+1
|
||||
r.arguments = nargs
|
||||
|
||||
# add routine to list
|
||||
routines.append(r)
|
||||
|
||||
[(c_name, c_code), (h_name, c_header)] = codegen.get_code_generator('C', 'ekf', 'C99').write(routines, "ekf")
|
||||
c_code = '\n'.join(x for x in c_code.split("\n") if len(x) > 0 and x[0] != '#')
|
||||
c_header = '\n'.join(x for x in c_header.split("\n") if len(x) > 0 and x[0] != '#')
|
||||
|
||||
return c_header, c_code
|
||||
|
|
@ -0,0 +1,9 @@
|
|||
import os
|
||||
from nose.tools import nottest
|
||||
|
||||
def phone_only(x):
|
||||
if os.path.isfile("/init.qcom.rc"):
|
||||
return x
|
||||
else:
|
||||
return nottest(x)
|
||||
|
||||
|
|
@ -0,0 +1,28 @@
|
|||
import os
|
||||
import unittest
|
||||
from uuid import uuid4
|
||||
|
||||
from common.file_helpers import atomic_write_on_fs_tmp
|
||||
from common.file_helpers import atomic_write_in_dir
|
||||
|
||||
|
||||
class TestFileHelpers(unittest.TestCase):
|
||||
def run_atomic_write_func(self, atomic_write_func):
|
||||
path = "/tmp/tmp{}".format(uuid4())
|
||||
with atomic_write_func(path) as f:
|
||||
f.write("test")
|
||||
|
||||
with open(path) as f:
|
||||
self.assertEqual(f.read(), "test")
|
||||
self.assertEqual(os.stat(path).st_mode & 0o777, 0o644)
|
||||
os.remove(path)
|
||||
|
||||
def test_atomic_write_on_fs_tmp(self):
|
||||
self.run_atomic_write_func(atomic_write_on_fs_tmp)
|
||||
|
||||
def test_atomic_write_in_dir(self):
|
||||
self.run_atomic_write_func(atomic_write_in_dir)
|
||||
|
||||
|
||||
if __name__ == "__main__":
|
||||
unittest.main()
|
||||
|
|
@ -0,0 +1,27 @@
|
|||
import numpy as np
|
||||
import unittest
|
||||
import timeit
|
||||
|
||||
from common.numpy_fast import interp
|
||||
|
||||
|
||||
class InterpTest(unittest.TestCase):
|
||||
def test_correctness_controls(self):
|
||||
_A_CRUISE_MIN_BP = np.asarray([0., 5., 10., 20., 40.])
|
||||
_A_CRUISE_MIN_V = np.asarray([-1.0, -.8, -.67, -.5, -.30])
|
||||
v_ego_arr = [-1, -1e-12, 0, 4, 5, 6, 7, 10, 11, 15.2, 20, 21, 39,
|
||||
39.999999, 40, 41]
|
||||
|
||||
expected = np.interp(v_ego_arr, _A_CRUISE_MIN_BP, _A_CRUISE_MIN_V)
|
||||
actual = interp(v_ego_arr, _A_CRUISE_MIN_BP, _A_CRUISE_MIN_V)
|
||||
|
||||
np.testing.assert_equal(actual, expected)
|
||||
|
||||
for v_ego in v_ego_arr:
|
||||
expected = np.interp(v_ego, _A_CRUISE_MIN_BP, _A_CRUISE_MIN_V)
|
||||
actual = interp(v_ego, _A_CRUISE_MIN_BP, _A_CRUISE_MIN_V)
|
||||
np.testing.assert_equal(actual, expected)
|
||||
|
||||
|
||||
if __name__ == "__main__":
|
||||
unittest.main()
|
||||
|
|
@ -0,0 +1,63 @@
|
|||
from common.params import Params, UnknownKeyName
|
||||
import threading
|
||||
import time
|
||||
import tempfile
|
||||
import shutil
|
||||
import unittest
|
||||
|
||||
|
||||
class TestParams(unittest.TestCase):
|
||||
def setUp(self):
|
||||
self.tmpdir = tempfile.mkdtemp()
|
||||
print("using", self.tmpdir)
|
||||
self.params = Params(self.tmpdir)
|
||||
|
||||
def tearDown(self):
|
||||
shutil.rmtree(self.tmpdir)
|
||||
|
||||
def test_params_put_and_get(self):
|
||||
self.params.put("DongleId", "cb38263377b873ee")
|
||||
assert self.params.get("DongleId") == b"cb38263377b873ee"
|
||||
|
||||
def test_params_non_ascii(self):
|
||||
st = b"\xe1\x90\xff"
|
||||
self.params.put("CarParams", st)
|
||||
assert self.params.get("CarParams") == st
|
||||
|
||||
def test_params_get_cleared_panda_disconnect(self):
|
||||
self.params.put("CarParams", "test")
|
||||
self.params.put("DongleId", "cb38263377b873ee")
|
||||
assert self.params.get("CarParams") == b"test"
|
||||
self.params.panda_disconnect()
|
||||
assert self.params.get("CarParams") is None
|
||||
assert self.params.get("DongleId") is not None
|
||||
|
||||
def test_params_get_cleared_manager_start(self):
|
||||
self.params.put("CarParams", "test")
|
||||
self.params.put("DongleId", "cb38263377b873ee")
|
||||
assert self.params.get("CarParams") == b"test"
|
||||
self.params.manager_start()
|
||||
assert self.params.get("CarParams") is None
|
||||
assert self.params.get("DongleId") is not None
|
||||
|
||||
def test_params_two_things(self):
|
||||
self.params.put("DongleId", "bob")
|
||||
self.params.put("AccessToken", "knope")
|
||||
assert self.params.get("DongleId") == b"bob"
|
||||
assert self.params.get("AccessToken") == b"knope"
|
||||
|
||||
def test_params_get_block(self):
|
||||
def _delayed_writer():
|
||||
time.sleep(0.1)
|
||||
self.params.put("CarParams", "test")
|
||||
threading.Thread(target=_delayed_writer).start()
|
||||
assert self.params.get("CarParams") is None
|
||||
assert self.params.get("CarParams", True) == b"test"
|
||||
|
||||
def test_params_unknown_key_fails(self):
|
||||
with self.assertRaises(UnknownKeyName):
|
||||
self.params.get("swag")
|
||||
|
||||
|
||||
if __name__ == "__main__":
|
||||
unittest.main()
|
||||
|
|
@ -0,0 +1,28 @@
|
|||
import signal
|
||||
|
||||
class TimeoutException(Exception):
|
||||
pass
|
||||
|
||||
class Timeout:
|
||||
"""
|
||||
Timeout context manager.
|
||||
For example this code will raise a TimeoutException:
|
||||
with Timeout(seconds=5, error_msg="Sleep was too long"):
|
||||
time.sleep(10)
|
||||
"""
|
||||
def __init__(self, seconds, error_msg=None):
|
||||
if error_msg is None:
|
||||
error_msg = 'Timed out after {} seconds'.format(seconds)
|
||||
self.seconds = seconds
|
||||
self.error_msg = error_msg
|
||||
|
||||
def handle_timeout(self, signume, frame):
|
||||
raise TimeoutException(self.error_msg)
|
||||
|
||||
def __enter__(self):
|
||||
signal.signal(signal.SIGALRM, self.handle_timeout)
|
||||
signal.alarm(self.seconds)
|
||||
|
||||
def __exit__(self, exc_type, exc_val, exc_tb):
|
||||
signal.alarm(0)
|
||||
|
||||
|
|
@ -0,0 +1,61 @@
|
|||
|
||||
Reference Frames
|
||||
------
|
||||
Many reference frames are used throughout. This
|
||||
folder contains all helper functions needed to
|
||||
transform between them. Generally this is done
|
||||
by generating a rotation matrix and multiplying.
|
||||
|
||||
|
||||
| Name | [x, y, z] | Units | Notes |
|
||||
| :-------------: |:-------------:| :-----:| :----: |
|
||||
| Geodetic | [Latitude, Longitude, Altitude] | geodetic coordinates | Sometimes used as [lon, lat, alt], avoid this frame. |
|
||||
| ECEF | [x, y, z] | meters | We use **ITRF14 (IGS14)**, NOT NAD83. <br> This is the global Mesh3D frame. |
|
||||
| NED | [North, East, Down] | meters | Relative to earth's surface, useful for vizualizing. |
|
||||
| Device | [Forward, Right, Down] | meters | This is the Mesh3D local frame. <br> Relative to camera, **not imu.** <br> 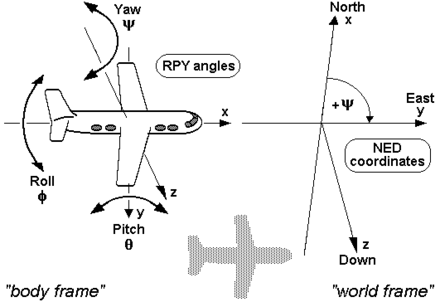|
|
||||
| Road | [Forward, Left, Up] | meters | On the road plane aligned to the vehicle. <br>  |
|
||||
| View | [Right, Down, Forward] | meters | Like device frame, but according to camera conventions. |
|
||||
| Camera | [u, v, focal] | pixels | Like view frame, but 2d on the camera image.|
|
||||
| Normalized Camera | [u / focal, v / focal, 1] | / | |
|
||||
| Model | [u, v, focal] | pixels | The sampled rectangle of the full camera frame the model uses. |
|
||||
| Normalized Model | [u / focal, v / focal, 1] | / | |
|
||||
|
||||
|
||||
|
||||
|
||||
Orientation Conventations
|
||||
------
|
||||
Quaternions, rotation matrices and euler angles are three
|
||||
equivalent representations of orientation and all three are
|
||||
used throughout the code base.
|
||||
|
||||
For euler angles the preferred convention is [roll, pitch, yaw]
|
||||
which corresponds to rotations around the [x, y, z] axes. All
|
||||
euler angles should always be in radians or radians/s unless
|
||||
for plotting or display purposes. For quaternions the hamilton
|
||||
notations is preferred which is [q<sub>w</sub>, q<sub>x</sub>, q<sub>y</sub>, q<sub>z</sub>]. All quaternions
|
||||
should always be normalized with a strictly positive q<sub>w</sub>. **These
|
||||
quaternions are a unique representation of orientation whereas euler angles
|
||||
or rotation matrices are not.**
|
||||
|
||||
To rotate from one frame into another with euler angles the
|
||||
convention is to rotate around roll, then pitch and then yaw,
|
||||
while rotating around the rotated axes, not the original axes.
|
||||
|
||||
|
||||
Calibration
|
||||
------
|
||||
EONs are not all mounted in the exact same way. To compensate for the effects of this the vision model takes in an image that is "calibrated". This means the image is aligned so the direction of travel of the car when it is going straight and the road is flat is always in the location on the image. This calibration is defined by a pitch and yaw angle that describe the direction of travel vector in device frame.
|
||||
|
||||
Example
|
||||
------
|
||||
To transform global Mesh3D positions and orientations (positions_ecef, quats_ecef) into the local frame described by the
|
||||
first position and orientation from Mesh3D one would do:
|
||||
```
|
||||
ecef_from_local = rot_from_quat(quats_ecef[0])
|
||||
local_from_ecef = ecef_from_local.T
|
||||
positions_local = np.einsum('ij,kj->ki', local_from_ecef, postions_ecef - positions_ecef[0])
|
||||
rotations_global = rot_from_quat(quats_ecef)
|
||||
rotations_local = np.einsum('ij,kjl->kil', local_from_ecef, rotations_global)
|
||||
eulers_local = euler_from_rot(rotations_local)
|
||||
```
|
||||
|
|
@ -0,0 +1,258 @@
|
|||
import numpy as np
|
||||
import common.transformations.orientation as orient
|
||||
import math
|
||||
|
||||
FULL_FRAME_SIZE = (1164, 874)
|
||||
W, H = FULL_FRAME_SIZE[0], FULL_FRAME_SIZE[1]
|
||||
eon_focal_length = FOCAL = 910.0
|
||||
|
||||
# aka 'K' aka camera_frame_from_view_frame
|
||||
eon_intrinsics = np.array([
|
||||
[FOCAL, 0., W/2.],
|
||||
[ 0., FOCAL, H/2.],
|
||||
[ 0., 0., 1.]])
|
||||
|
||||
|
||||
leon_dcam_intrinsics = np.array([
|
||||
[650, 0, 816//2],
|
||||
[ 0, 650, 612//2],
|
||||
[ 0, 0, 1]])
|
||||
|
||||
eon_dcam_intrinsics = np.array([
|
||||
[860, 0, 1152//2],
|
||||
[ 0, 860, 864//2],
|
||||
[ 0, 0, 1]])
|
||||
|
||||
# aka 'K_inv' aka view_frame_from_camera_frame
|
||||
eon_intrinsics_inv = np.linalg.inv(eon_intrinsics)
|
||||
|
||||
|
||||
# device/mesh : x->forward, y-> right, z->down
|
||||
# view : x->right, y->down, z->forward
|
||||
device_frame_from_view_frame = np.array([
|
||||
[ 0., 0., 1.],
|
||||
[ 1., 0., 0.],
|
||||
[ 0., 1., 0.]
|
||||
])
|
||||
view_frame_from_device_frame = device_frame_from_view_frame.T
|
||||
|
||||
|
||||
def get_calib_from_vp(vp):
|
||||
vp_norm = normalize(vp)
|
||||
yaw_calib = np.arctan(vp_norm[0])
|
||||
pitch_calib = -np.arctan(vp_norm[1]*np.cos(yaw_calib))
|
||||
roll_calib = 0
|
||||
return roll_calib, pitch_calib, yaw_calib
|
||||
|
||||
|
||||
# aka 'extrinsic_matrix'
|
||||
# road : x->forward, y -> left, z->up
|
||||
def get_view_frame_from_road_frame(roll, pitch, yaw, height):
|
||||
device_from_road = orient.rot_from_euler([roll, pitch, yaw]).dot(np.diag([1, -1, -1]))
|
||||
view_from_road = view_frame_from_device_frame.dot(device_from_road)
|
||||
return np.hstack((view_from_road, [[0], [height], [0]]))
|
||||
|
||||
|
||||
def vp_from_ke(m):
|
||||
"""
|
||||
Computes the vanishing point from the product of the intrinsic and extrinsic
|
||||
matrices C = KE.
|
||||
|
||||
The vanishing point is defined as lim x->infinity C (x, 0, 0, 1).T
|
||||
"""
|
||||
return (m[0, 0]/m[2,0], m[1,0]/m[2,0])
|
||||
|
||||
|
||||
def vp_from_rpy(rpy):
|
||||
e = get_view_frame_from_road_frame(rpy[0], rpy[1], rpy[2], 1.22)
|
||||
ke = np.dot(eon_intrinsics, e)
|
||||
return vp_from_ke(ke)
|
||||
|
||||
|
||||
def roll_from_ke(m):
|
||||
# note: different from calibration.h/RollAnglefromKE: i think that one's just wrong
|
||||
return np.arctan2(-(m[1, 0] - m[1, 1] * m[2, 0] / m[2, 1]),
|
||||
-(m[0, 0] - m[0, 1] * m[2, 0] / m[2, 1]))
|
||||
|
||||
|
||||
def normalize(img_pts, intrinsics=eon_intrinsics):
|
||||
# normalizes image coordinates
|
||||
# accepts single pt or array of pts
|
||||
intrinsics_inv = np.linalg.inv(intrinsics)
|
||||
img_pts = np.array(img_pts)
|
||||
input_shape = img_pts.shape
|
||||
img_pts = np.atleast_2d(img_pts)
|
||||
img_pts = np.hstack((img_pts, np.ones((img_pts.shape[0],1))))
|
||||
img_pts_normalized = img_pts.dot(intrinsics_inv.T)
|
||||
img_pts_normalized[(img_pts < 0).any(axis=1)] = np.nan
|
||||
return img_pts_normalized[:,:2].reshape(input_shape)
|
||||
|
||||
|
||||
def denormalize(img_pts, intrinsics=eon_intrinsics):
|
||||
# denormalizes image coordinates
|
||||
# accepts single pt or array of pts
|
||||
img_pts = np.array(img_pts)
|
||||
input_shape = img_pts.shape
|
||||
img_pts = np.atleast_2d(img_pts)
|
||||
img_pts = np.hstack((img_pts, np.ones((img_pts.shape[0],1))))
|
||||
img_pts_denormalized = img_pts.dot(intrinsics.T)
|
||||
img_pts_denormalized[img_pts_denormalized[:,0] > W] = np.nan
|
||||
img_pts_denormalized[img_pts_denormalized[:,0] < 0] = np.nan
|
||||
img_pts_denormalized[img_pts_denormalized[:,1] > H] = np.nan
|
||||
img_pts_denormalized[img_pts_denormalized[:,1] < 0] = np.nan
|
||||
return img_pts_denormalized[:,:2].reshape(input_shape)
|
||||
|
||||
|
||||
def device_from_ecef(pos_ecef, orientation_ecef, pt_ecef):
|
||||
# device from ecef frame
|
||||
# device frame is x -> forward, y-> right, z -> down
|
||||
# accepts single pt or array of pts
|
||||
input_shape = pt_ecef.shape
|
||||
pt_ecef = np.atleast_2d(pt_ecef)
|
||||
ecef_from_device_rot = orient.rotations_from_quats(orientation_ecef)
|
||||
device_from_ecef_rot = ecef_from_device_rot.T
|
||||
pt_ecef_rel = pt_ecef - pos_ecef
|
||||
pt_device = np.einsum('jk,ik->ij', device_from_ecef_rot, pt_ecef_rel)
|
||||
return pt_device.reshape(input_shape)
|
||||
|
||||
|
||||
def img_from_device(pt_device):
|
||||
# img coordinates from pts in device frame
|
||||
# first transforms to view frame, then to img coords
|
||||
# accepts single pt or array of pts
|
||||
input_shape = pt_device.shape
|
||||
pt_device = np.atleast_2d(pt_device)
|
||||
pt_view = np.einsum('jk,ik->ij', view_frame_from_device_frame, pt_device)
|
||||
|
||||
# This function should never return negative depths
|
||||
pt_view[pt_view[:,2] < 0] = np.nan
|
||||
|
||||
pt_img = pt_view/pt_view[:,2:3]
|
||||
return pt_img.reshape(input_shape)[:,:2]
|
||||
|
||||
|
||||
#TODO please use generic img transform below
|
||||
def rotate_img(img, eulers, crop=None, intrinsics=eon_intrinsics):
|
||||
import cv2 # pylint: disable=import-error
|
||||
|
||||
size = img.shape[:2]
|
||||
rot = orient.rot_from_euler(eulers)
|
||||
quadrangle = np.array([[0, 0],
|
||||
[size[1]-1, 0],
|
||||
[0, size[0]-1],
|
||||
[size[1]-1, size[0]-1]], dtype=np.float32)
|
||||
quadrangle_norm = np.hstack((normalize(quadrangle, intrinsics=intrinsics), np.ones((4,1))))
|
||||
warped_quadrangle_full = np.einsum('ij, kj->ki', intrinsics.dot(rot), quadrangle_norm)
|
||||
warped_quadrangle = np.column_stack((warped_quadrangle_full[:,0]/warped_quadrangle_full[:,2],
|
||||
warped_quadrangle_full[:,1]/warped_quadrangle_full[:,2])).astype(np.float32)
|
||||
if crop:
|
||||
W_border = (size[1] - crop[0])//2
|
||||
H_border = (size[0] - crop[1])//2
|
||||
outside_crop = (((warped_quadrangle[:,0] < W_border) |
|
||||
(warped_quadrangle[:,0] >= size[1] - W_border)) &
|
||||
((warped_quadrangle[:,1] < H_border) |
|
||||
(warped_quadrangle[:,1] >= size[0] - H_border)))
|
||||
if not outside_crop.all():
|
||||
raise ValueError("warped image not contained inside crop")
|
||||
else:
|
||||
H_border, W_border = 0, 0
|
||||
M = cv2.getPerspectiveTransform(quadrangle, warped_quadrangle)
|
||||
img_warped = cv2.warpPerspective(img, M, size[::-1])
|
||||
return img_warped[H_border: size[0] - H_border,
|
||||
W_border: size[1] - W_border]
|
||||
|
||||
|
||||
def get_camera_frame_from_calib_frame(camera_frame_from_road_frame):
|
||||
camera_frame_from_ground = camera_frame_from_road_frame[:, (0, 1, 3)]
|
||||
calib_frame_from_ground = np.dot(eon_intrinsics,
|
||||
get_view_frame_from_road_frame(0, 0, 0, 1.22))[:, (0, 1, 3)]
|
||||
ground_from_calib_frame = np.linalg.inv(calib_frame_from_ground)
|
||||
camera_frame_from_calib_frame = np.dot(camera_frame_from_ground, ground_from_calib_frame)
|
||||
return camera_frame_from_calib_frame
|
||||
|
||||
|
||||
def pretransform_from_calib(calib):
|
||||
roll, pitch, yaw, height = calib
|
||||
view_frame_from_road_frame = get_view_frame_from_road_frame(roll, pitch, yaw, height)
|
||||
camera_frame_from_road_frame = np.dot(eon_intrinsics, view_frame_from_road_frame)
|
||||
camera_frame_from_calib_frame = get_camera_frame_from_calib_frame(camera_frame_from_road_frame)
|
||||
return np.linalg.inv(camera_frame_from_calib_frame)
|
||||
|
||||
|
||||
def transform_img(base_img,
|
||||
augment_trans=np.array([0,0,0]),
|
||||
augment_eulers=np.array([0,0,0]),
|
||||
from_intr=eon_intrinsics,
|
||||
to_intr=eon_intrinsics,
|
||||
output_size=None,
|
||||
pretransform=None,
|
||||
top_hacks=False,
|
||||
yuv=False,
|
||||
alpha=1.0,
|
||||
beta=0,
|
||||
blur=0):
|
||||
import cv2 # pylint: disable=import-error
|
||||
cv2.setNumThreads(1)
|
||||
|
||||
if yuv:
|
||||
base_img = cv2.cvtColor(base_img, cv2.COLOR_YUV2RGB_I420)
|
||||
|
||||
size = base_img.shape[:2]
|
||||
if not output_size:
|
||||
output_size = size[::-1]
|
||||
|
||||
cy = from_intr[1,2]
|
||||
def get_M(h=1.22):
|
||||
quadrangle = np.array([[0, cy + 20],
|
||||
[size[1]-1, cy + 20],
|
||||
[0, size[0]-1],
|
||||
[size[1]-1, size[0]-1]], dtype=np.float32)
|
||||
quadrangle_norm = np.hstack((normalize(quadrangle, intrinsics=from_intr), np.ones((4,1))))
|
||||
quadrangle_world = np.column_stack((h*quadrangle_norm[:,0]/quadrangle_norm[:,1],
|
||||
h*np.ones(4),
|
||||
h/quadrangle_norm[:,1]))
|
||||
rot = orient.rot_from_euler(augment_eulers)
|
||||
to_extrinsics = np.hstack((rot.T, -augment_trans[:,None]))
|
||||
to_KE = to_intr.dot(to_extrinsics)
|
||||
warped_quadrangle_full = np.einsum('jk,ik->ij', to_KE, np.hstack((quadrangle_world, np.ones((4,1)))))
|
||||
warped_quadrangle = np.column_stack((warped_quadrangle_full[:,0]/warped_quadrangle_full[:,2],
|
||||
warped_quadrangle_full[:,1]/warped_quadrangle_full[:,2])).astype(np.float32)
|
||||
M = cv2.getPerspectiveTransform(quadrangle, warped_quadrangle.astype(np.float32))
|
||||
return M
|
||||
|
||||
M = get_M()
|
||||
if pretransform is not None:
|
||||
M = M.dot(pretransform)
|
||||
augmented_rgb = cv2.warpPerspective(base_img, M, output_size, borderMode=cv2.BORDER_REPLICATE)
|
||||
|
||||
if top_hacks:
|
||||
cyy = int(math.ceil(to_intr[1,2]))
|
||||
M = get_M(1000)
|
||||
if pretransform is not None:
|
||||
M = M.dot(pretransform)
|
||||
augmented_rgb[:cyy] = cv2.warpPerspective(base_img, M, (output_size[0], cyy), borderMode=cv2.BORDER_REPLICATE)
|
||||
|
||||
# brightness and contrast augment
|
||||
augmented_rgb = np.clip((float(alpha)*augmented_rgb + beta), 0, 255).astype(np.uint8)
|
||||
|
||||
# gaussian blur
|
||||
if blur > 0:
|
||||
augmented_rgb = cv2.GaussianBlur(augmented_rgb,(blur*2+1,blur*2+1),cv2.BORDER_DEFAULT)
|
||||
|
||||
if yuv:
|
||||
augmented_img = cv2.cvtColor(augmented_rgb, cv2.COLOR_RGB2YUV_I420)
|
||||
else:
|
||||
augmented_img = augmented_rgb
|
||||
return augmented_img
|
||||
|
||||
|
||||
def yuv_crop(frame, output_size, center=None):
|
||||
# output_size in camera coordinates so u,v
|
||||
# center in array coordinates so row, column
|
||||
import cv2 # pylint: disable=import-error
|
||||
rgb = cv2.cvtColor(frame, cv2.COLOR_YUV2RGB_I420)
|
||||
if not center:
|
||||
center = (rgb.shape[0]/2, rgb.shape[1]/2)
|
||||
rgb_crop = rgb[center[0] - output_size[1]/2: center[0] + output_size[1]/2,
|
||||
center[1] - output_size[0]/2: center[1] + output_size[0]/2]
|
||||
return cv2.cvtColor(rgb_crop, cv2.COLOR_RGB2YUV_I420)
|
||||
|
|
@ -0,0 +1,108 @@
|
|||
import numpy as np
|
||||
"""
|
||||
Coordinate transformation module. All methods accept arrays as input
|
||||
with each row as a position.
|
||||
"""
|
||||
|
||||
|
||||
|
||||
a = 6378137
|
||||
b = 6356752.3142
|
||||
esq = 6.69437999014 * 0.001
|
||||
e1sq = 6.73949674228 * 0.001
|
||||
|
||||
|
||||
def geodetic2ecef(geodetic, radians=False):
|
||||
geodetic = np.array(geodetic)
|
||||
input_shape = geodetic.shape
|
||||
geodetic = np.atleast_2d(geodetic)
|
||||
|
||||
ratio = 1.0 if radians else (np.pi / 180.0)
|
||||
lat = ratio*geodetic[:,0]
|
||||
lon = ratio*geodetic[:,1]
|
||||
alt = geodetic[:,2]
|
||||
|
||||
xi = np.sqrt(1 - esq * np.sin(lat)**2)
|
||||
x = (a / xi + alt) * np.cos(lat) * np.cos(lon)
|
||||
y = (a / xi + alt) * np.cos(lat) * np.sin(lon)
|
||||
z = (a / xi * (1 - esq) + alt) * np.sin(lat)
|
||||
ecef = np.array([x, y, z]).T
|
||||
return ecef.reshape(input_shape)
|
||||
|
||||
|
||||
def ecef2geodetic(ecef, radians=False):
|
||||
"""
|
||||
Convert ECEF coordinates to geodetic using ferrari's method
|
||||
"""
|
||||
# Save shape and export column
|
||||
ecef = np.atleast_1d(ecef)
|
||||
input_shape = ecef.shape
|
||||
ecef = np.atleast_2d(ecef)
|
||||
x, y, z = ecef[:, 0], ecef[:, 1], ecef[:, 2]
|
||||
|
||||
ratio = 1.0 if radians else (180.0 / np.pi)
|
||||
|
||||
# Conver from ECEF to geodetic using Ferrari's methods
|
||||
# https://en.wikipedia.org/wiki/Geographic_coordinate_conversion#Ferrari.27s_solution
|
||||
r = np.sqrt(x * x + y * y)
|
||||
Esq = a * a - b * b
|
||||
F = 54 * b * b * z * z
|
||||
G = r * r + (1 - esq) * z * z - esq * Esq
|
||||
C = (esq * esq * F * r * r) / (pow(G, 3))
|
||||
S = np.cbrt(1 + C + np.sqrt(C * C + 2 * C))
|
||||
P = F / (3 * pow((S + 1 / S + 1), 2) * G * G)
|
||||
Q = np.sqrt(1 + 2 * esq * esq * P)
|
||||
r_0 = -(P * esq * r) / (1 + Q) + np.sqrt(0.5 * a * a*(1 + 1.0 / Q) - \
|
||||
P * (1 - esq) * z * z / (Q * (1 + Q)) - 0.5 * P * r * r)
|
||||
U = np.sqrt(pow((r - esq * r_0), 2) + z * z)
|
||||
V = np.sqrt(pow((r - esq * r_0), 2) + (1 - esq) * z * z)
|
||||
Z_0 = b * b * z / (a * V)
|
||||
h = U * (1 - b * b / (a * V))
|
||||
lat = ratio*np.arctan((z + e1sq * Z_0) / r)
|
||||
lon = ratio*np.arctan2(y, x)
|
||||
|
||||
# stack the new columns and return to the original shape
|
||||
geodetic = np.column_stack((lat, lon, h))
|
||||
return geodetic.reshape(input_shape)
|
||||
|
||||
class LocalCoord():
|
||||
"""
|
||||
Allows conversions to local frames. In this case NED.
|
||||
That is: North East Down from the start position in
|
||||
meters.
|
||||
"""
|
||||
def __init__(self, init_geodetic, init_ecef):
|
||||
self.init_ecef = init_ecef
|
||||
lat, lon, _ = (np.pi/180)*np.array(init_geodetic)
|
||||
self.ned2ecef_matrix = np.array([[-np.sin(lat)*np.cos(lon), -np.sin(lon), -np.cos(lat)*np.cos(lon)],
|
||||
[-np.sin(lat)*np.sin(lon), np.cos(lon), -np.cos(lat)*np.sin(lon)],
|
||||
[np.cos(lat), 0, -np.sin(lat)]])
|
||||
self.ecef2ned_matrix = self.ned2ecef_matrix.T
|
||||
|
||||
@classmethod
|
||||
def from_geodetic(cls, init_geodetic):
|
||||
init_ecef = geodetic2ecef(init_geodetic)
|
||||
return LocalCoord(init_geodetic, init_ecef)
|
||||
|
||||
@classmethod
|
||||
def from_ecef(cls, init_ecef):
|
||||
init_geodetic = ecef2geodetic(init_ecef)
|
||||
return LocalCoord(init_geodetic, init_ecef)
|
||||
|
||||
|
||||
def ecef2ned(self, ecef):
|
||||
ecef = np.array(ecef)
|
||||
return np.dot(self.ecef2ned_matrix, (ecef - self.init_ecef).T).T
|
||||
|
||||
def ned2ecef(self, ned):
|
||||
ned = np.array(ned)
|
||||
# Transpose so that init_ecef will broadcast correctly for 1d or 2d ned.
|
||||
return (np.dot(self.ned2ecef_matrix, ned.T).T + self.init_ecef)
|
||||
|
||||
def geodetic2ned(self, geodetic):
|
||||
ecef = geodetic2ecef(geodetic)
|
||||
return self.ecef2ned(ecef)
|
||||
|
||||
def ned2geodetic(self, ned):
|
||||
ecef = self.ned2ecef(ned)
|
||||
return ecef2geodetic(ecef)
|
||||
|
|
@ -0,0 +1,150 @@
|
|||
import numpy as np
|
||||
|
||||
from common.transformations.camera import (FULL_FRAME_SIZE, eon_focal_length,
|
||||
get_view_frame_from_road_frame,
|
||||
vp_from_ke)
|
||||
|
||||
# segnet
|
||||
|
||||
SEGNET_SIZE = (512, 384)
|
||||
|
||||
segnet_frame_from_camera_frame = np.array([
|
||||
[float(SEGNET_SIZE[0])/FULL_FRAME_SIZE[0], 0., ],
|
||||
[ 0., float(SEGNET_SIZE[1])/FULL_FRAME_SIZE[1]]])
|
||||
|
||||
|
||||
# model
|
||||
|
||||
MODEL_INPUT_SIZE = (320, 160)
|
||||
MODEL_YUV_SIZE = (MODEL_INPUT_SIZE[0], MODEL_INPUT_SIZE[1] * 3 // 2)
|
||||
MODEL_CX = MODEL_INPUT_SIZE[0]/2.
|
||||
MODEL_CY = 21.
|
||||
|
||||
model_zoom = 1.25
|
||||
model_height = 1.22
|
||||
|
||||
# canonical model transform
|
||||
model_intrinsics = np.array(
|
||||
[[ eon_focal_length / model_zoom, 0. , MODEL_CX],
|
||||
[ 0. , eon_focal_length / model_zoom, MODEL_CY],
|
||||
[ 0. , 0. , 1.]])
|
||||
|
||||
|
||||
# MED model
|
||||
MEDMODEL_INPUT_SIZE = (512, 256)
|
||||
MEDMODEL_YUV_SIZE = (MEDMODEL_INPUT_SIZE[0], MEDMODEL_INPUT_SIZE[1] * 3 // 2)
|
||||
MEDMODEL_CY = 47.6
|
||||
|
||||
medmodel_zoom = 1.
|
||||
medmodel_intrinsics = np.array(
|
||||
[[ eon_focal_length / medmodel_zoom, 0. , 0.5 * MEDMODEL_INPUT_SIZE[0]],
|
||||
[ 0. , eon_focal_length / medmodel_zoom, MEDMODEL_CY],
|
||||
[ 0. , 0. , 1.]])
|
||||
|
||||
|
||||
# BIG model
|
||||
|
||||
BIGMODEL_INPUT_SIZE = (864, 288)
|
||||
BIGMODEL_YUV_SIZE = (BIGMODEL_INPUT_SIZE[0], BIGMODEL_INPUT_SIZE[1] * 3 // 2)
|
||||
|
||||
bigmodel_zoom = 1.
|
||||
bigmodel_intrinsics = np.array(
|
||||
[[ eon_focal_length / bigmodel_zoom, 0. , 0.5 * BIGMODEL_INPUT_SIZE[0]],
|
||||
[ 0. , eon_focal_length / bigmodel_zoom, 0.2 * BIGMODEL_INPUT_SIZE[1]],
|
||||
[ 0. , 0. , 1.]])
|
||||
|
||||
|
||||
bigmodel_border = np.array([
|
||||
[0,0,1],
|
||||
[BIGMODEL_INPUT_SIZE[0], 0, 1],
|
||||
[BIGMODEL_INPUT_SIZE[0], BIGMODEL_INPUT_SIZE[1], 1],
|
||||
[0, BIGMODEL_INPUT_SIZE[1], 1],
|
||||
])
|
||||
|
||||
|
||||
model_frame_from_road_frame = np.dot(model_intrinsics,
|
||||
get_view_frame_from_road_frame(0, 0, 0, model_height))
|
||||
|
||||
bigmodel_frame_from_road_frame = np.dot(bigmodel_intrinsics,
|
||||
get_view_frame_from_road_frame(0, 0, 0, model_height))
|
||||
|
||||
medmodel_frame_from_road_frame = np.dot(medmodel_intrinsics,
|
||||
get_view_frame_from_road_frame(0, 0, 0, model_height))
|
||||
|
||||
model_frame_from_bigmodel_frame = np.dot(model_intrinsics, np.linalg.inv(bigmodel_intrinsics))
|
||||
|
||||
# 'camera from model camera'
|
||||
def get_model_height_transform(camera_frame_from_road_frame, height):
|
||||
camera_frame_from_road_ground = np.dot(camera_frame_from_road_frame, np.array([
|
||||
[1, 0, 0],
|
||||
[0, 1, 0],
|
||||
[0, 0, 0],
|
||||
[0, 0, 1],
|
||||
]))
|
||||
|
||||
camera_frame_from_road_high = np.dot(camera_frame_from_road_frame, np.array([
|
||||
[1, 0, 0],
|
||||
[0, 1, 0],
|
||||
[0, 0, height - model_height],
|
||||
[0, 0, 1],
|
||||
]))
|
||||
|
||||
road_high_from_camera_frame = np.linalg.inv(camera_frame_from_road_high)
|
||||
high_camera_from_low_camera = np.dot(camera_frame_from_road_ground, road_high_from_camera_frame)
|
||||
|
||||
return high_camera_from_low_camera
|
||||
|
||||
|
||||
# camera_frame_from_model_frame aka 'warp matrix'
|
||||
# was: calibration.h/CalibrationTransform
|
||||
def get_camera_frame_from_model_frame(camera_frame_from_road_frame, height=model_height):
|
||||
vp = vp_from_ke(camera_frame_from_road_frame)
|
||||
|
||||
model_camera_from_model_frame = np.array([
|
||||
[model_zoom, 0., vp[0] - MODEL_CX * model_zoom],
|
||||
[ 0., model_zoom, vp[1] - MODEL_CY * model_zoom],
|
||||
[ 0., 0., 1.],
|
||||
])
|
||||
|
||||
# This function is super slow, so skip it if height is very close to canonical
|
||||
# TODO: speed it up!
|
||||
if abs(height - model_height) > 0.001: #
|
||||
camera_from_model_camera = get_model_height_transform(camera_frame_from_road_frame, height)
|
||||
else:
|
||||
camera_from_model_camera = np.eye(3)
|
||||
|
||||
return np.dot(camera_from_model_camera, model_camera_from_model_frame)
|
||||
|
||||
|
||||
def get_camera_frame_from_medmodel_frame(camera_frame_from_road_frame):
|
||||
camera_frame_from_ground = camera_frame_from_road_frame[:, (0, 1, 3)]
|
||||
medmodel_frame_from_ground = medmodel_frame_from_road_frame[:, (0, 1, 3)]
|
||||
|
||||
ground_from_medmodel_frame = np.linalg.inv(medmodel_frame_from_ground)
|
||||
camera_frame_from_medmodel_frame = np.dot(camera_frame_from_ground, ground_from_medmodel_frame)
|
||||
|
||||
return camera_frame_from_medmodel_frame
|
||||
|
||||
|
||||
def get_camera_frame_from_bigmodel_frame(camera_frame_from_road_frame):
|
||||
camera_frame_from_ground = camera_frame_from_road_frame[:, (0, 1, 3)]
|
||||
bigmodel_frame_from_ground = bigmodel_frame_from_road_frame[:, (0, 1, 3)]
|
||||
|
||||
ground_from_bigmodel_frame = np.linalg.inv(bigmodel_frame_from_ground)
|
||||
camera_frame_from_bigmodel_frame = np.dot(camera_frame_from_ground, ground_from_bigmodel_frame)
|
||||
|
||||
return camera_frame_from_bigmodel_frame
|
||||
|
||||
|
||||
def get_model_frame(snu_full, camera_frame_from_model_frame, size):
|
||||
idxs = camera_frame_from_model_frame.dot(np.column_stack([np.tile(np.arange(size[0]), size[1]),
|
||||
np.tile(np.arange(size[1]), (size[0],1)).T.flatten(),
|
||||
np.ones(size[0] * size[1])]).T).T.astype(int)
|
||||
calib_flat = snu_full[idxs[:,1], idxs[:,0]]
|
||||
if len(snu_full.shape) == 3:
|
||||
calib = calib_flat.reshape((size[1], size[0], 3))
|
||||
elif len(snu_full.shape) == 2:
|
||||
calib = calib_flat.reshape((size[1], size[0]))
|
||||
else:
|
||||
raise ValueError("shape of input img is weird")
|
||||
return calib
|
||||
|
|
@ -0,0 +1,295 @@
|
|||
import numpy as np
|
||||
from numpy import dot, inner, array, linalg
|
||||
from common.transformations.coordinates import LocalCoord
|
||||
|
||||
|
||||
'''
|
||||
Vectorized functions that transform between
|
||||
rotation matrices, euler angles and quaternions.
|
||||
All support lists, array or array of arrays as inputs.
|
||||
Supports both x2y and y_from_x format (y_from_x preferred!).
|
||||
'''
|
||||
|
||||
def euler2quat(eulers):
|
||||
eulers = array(eulers)
|
||||
if len(eulers.shape) > 1:
|
||||
output_shape = (-1,4)
|
||||
else:
|
||||
output_shape = (4,)
|
||||
eulers = np.atleast_2d(eulers)
|
||||
gamma, theta, psi = eulers[:,0], eulers[:,1], eulers[:,2]
|
||||
|
||||
q0 = np.cos(gamma / 2) * np.cos(theta / 2) * np.cos(psi / 2) + \
|
||||
np.sin(gamma / 2) * np.sin(theta / 2) * np.sin(psi / 2)
|
||||
q1 = np.sin(gamma / 2) * np.cos(theta / 2) * np.cos(psi / 2) - \
|
||||
np.cos(gamma / 2) * np.sin(theta / 2) * np.sin(psi / 2)
|
||||
q2 = np.cos(gamma / 2) * np.sin(theta / 2) * np.cos(psi / 2) + \
|
||||
np.sin(gamma / 2) * np.cos(theta / 2) * np.sin(psi / 2)
|
||||
q3 = np.cos(gamma / 2) * np.cos(theta / 2) * np.sin(psi / 2) - \
|
||||
np.sin(gamma / 2) * np.sin(theta / 2) * np.cos(psi / 2)
|
||||
|
||||
quats = array([q0, q1, q2, q3]).T
|
||||
for i in range(len(quats)):
|
||||
if quats[i,0] < 0:
|
||||
quats[i] = -quats[i]
|
||||
return quats.reshape(output_shape)
|
||||
|
||||
|
||||
def quat2euler(quats):
|
||||
quats = array(quats)
|
||||
if len(quats.shape) > 1:
|
||||
output_shape = (-1,3)
|
||||
else:
|
||||
output_shape = (3,)
|
||||
quats = np.atleast_2d(quats)
|
||||
q0, q1, q2, q3 = quats[:,0], quats[:,1], quats[:,2], quats[:,3]
|
||||
|
||||
gamma = np.arctan2(2 * (q0 * q1 + q2 * q3), 1 - 2 * (q1**2 + q2**2))
|
||||
theta = np.arcsin(2 * (q0 * q2 - q3 * q1))
|
||||
psi = np.arctan2(2 * (q0 * q3 + q1 * q2), 1 - 2 * (q2**2 + q3**2))
|
||||
|
||||
eulers = array([gamma, theta, psi]).T
|
||||
return eulers.reshape(output_shape)
|
||||
|
||||
|
||||
def quat2rot(quats):
|
||||
quats = array(quats)
|
||||
input_shape = quats.shape
|
||||
quats = np.atleast_2d(quats)
|
||||
Rs = np.zeros((quats.shape[0], 3, 3))
|
||||
q0 = quats[:, 0]
|
||||
q1 = quats[:, 1]
|
||||
q2 = quats[:, 2]
|
||||
q3 = quats[:, 3]
|
||||
Rs[:, 0, 0] = q0 * q0 + q1 * q1 - q2 * q2 - q3 * q3
|
||||
Rs[:, 0, 1] = 2 * (q1 * q2 - q0 * q3)
|
||||
Rs[:, 0, 2] = 2 * (q0 * q2 + q1 * q3)
|
||||
Rs[:, 1, 0] = 2 * (q1 * q2 + q0 * q3)
|
||||
Rs[:, 1, 1] = q0 * q0 - q1 * q1 + q2 * q2 - q3 * q3
|
||||
Rs[:, 1, 2] = 2 * (q2 * q3 - q0 * q1)
|
||||
Rs[:, 2, 0] = 2 * (q1 * q3 - q0 * q2)
|
||||
Rs[:, 2, 1] = 2 * (q0 * q1 + q2 * q3)
|
||||
Rs[:, 2, 2] = q0 * q0 - q1 * q1 - q2 * q2 + q3 * q3
|
||||
|
||||
if len(input_shape) < 2:
|
||||
return Rs[0]
|
||||
else:
|
||||
return Rs
|
||||
|
||||
|
||||
def rot2quat(rots):
|
||||
input_shape = rots.shape
|
||||
if len(input_shape) < 3:
|
||||
rots = array([rots])
|
||||
K3 = np.empty((len(rots), 4, 4))
|
||||
K3[:, 0, 0] = (rots[:, 0, 0] - rots[:, 1, 1] - rots[:, 2, 2]) / 3.0
|
||||
K3[:, 0, 1] = (rots[:, 1, 0] + rots[:, 0, 1]) / 3.0
|
||||
K3[:, 0, 2] = (rots[:, 2, 0] + rots[:, 0, 2]) / 3.0
|
||||
K3[:, 0, 3] = (rots[:, 1, 2] - rots[:, 2, 1]) / 3.0
|
||||
K3[:, 1, 0] = K3[:, 0, 1]
|
||||
K3[:, 1, 1] = (rots[:, 1, 1] - rots[:, 0, 0] - rots[:, 2, 2]) / 3.0
|
||||
K3[:, 1, 2] = (rots[:, 2, 1] + rots[:, 1, 2]) / 3.0
|
||||
K3[:, 1, 3] = (rots[:, 2, 0] - rots[:, 0, 2]) / 3.0
|
||||
K3[:, 2, 0] = K3[:, 0, 2]
|
||||
K3[:, 2, 1] = K3[:, 1, 2]
|
||||
K3[:, 2, 2] = (rots[:, 2, 2] - rots[:, 0, 0] - rots[:, 1, 1]) / 3.0
|
||||
K3[:, 2, 3] = (rots[:, 0, 1] - rots[:, 1, 0]) / 3.0
|
||||
K3[:, 3, 0] = K3[:, 0, 3]
|
||||
K3[:, 3, 1] = K3[:, 1, 3]
|
||||
K3[:, 3, 2] = K3[:, 2, 3]
|
||||
K3[:, 3, 3] = (rots[:, 0, 0] + rots[:, 1, 1] + rots[:, 2, 2]) / 3.0
|
||||
q = np.empty((len(rots), 4))
|
||||
for i in range(len(rots)):
|
||||
_, eigvecs = linalg.eigh(K3[i].T)
|
||||
eigvecs = eigvecs[:,3:]
|
||||
q[i, 0] = eigvecs[-1]
|
||||
q[i, 1:] = -eigvecs[:-1].flatten()
|
||||
if q[i, 0] < 0:
|
||||
q[i] = -q[i]
|
||||
|
||||
if len(input_shape) < 3:
|
||||
return q[0]
|
||||
else:
|
||||
return q
|
||||
|
||||
|
||||
def euler2rot(eulers):
|
||||
return rotations_from_quats(euler2quat(eulers))
|
||||
|
||||
|
||||
def rot2euler(rots):
|
||||
return quat2euler(quats_from_rotations(rots))
|
||||
|
||||
|
||||
quats_from_rotations = rot2quat
|
||||
quat_from_rot = rot2quat
|
||||
rotations_from_quats = quat2rot
|
||||
rot_from_quat= quat2rot
|
||||
rot_from_quat= quat2rot
|
||||
euler_from_rot = rot2euler
|
||||
euler_from_quat = quat2euler
|
||||
rot_from_euler = euler2rot
|
||||
quat_from_euler = euler2quat
|
||||
|
||||
|
||||
|
||||
|
||||
|
||||
|
||||
'''
|
||||
Random helpers below
|
||||
'''
|
||||
|
||||
|
||||
def quat_product(q, r):
|
||||
t = np.zeros(4)
|
||||
t[0] = r[0] * q[0] - r[1] * q[1] - r[2] * q[2] - r[3] * q[3]
|
||||
t[1] = r[0] * q[1] + r[1] * q[0] - r[2] * q[3] + r[3] * q[2]
|
||||
t[2] = r[0] * q[2] + r[1] * q[3] + r[2] * q[0] - r[3] * q[1]
|
||||
t[3] = r[0] * q[3] - r[1] * q[2] + r[2] * q[1] + r[3] * q[0]
|
||||
return t
|
||||
|
||||
|
||||
def rot_matrix(roll, pitch, yaw):
|
||||
cr, sr = np.cos(roll), np.sin(roll)
|
||||
cp, sp = np.cos(pitch), np.sin(pitch)
|
||||
cy, sy = np.cos(yaw), np.sin(yaw)
|
||||
rr = array([[1,0,0],[0, cr,-sr],[0, sr, cr]])
|
||||
rp = array([[cp,0,sp],[0, 1,0],[-sp, 0, cp]])
|
||||
ry = array([[cy,-sy,0],[sy, cy,0],[0, 0, 1]])
|
||||
return ry.dot(rp.dot(rr))
|
||||
|
||||
|
||||
def rot(axis, angle):
|
||||
# Rotates around an arbitrary axis
|
||||
ret_1 = (1 - np.cos(angle)) * array([[axis[0]**2, axis[0] * axis[1], axis[0] * axis[2]], [
|
||||
axis[1] * axis[0], axis[1]**2, axis[1] * axis[2]
|
||||
], [axis[2] * axis[0], axis[2] * axis[1], axis[2]**2]])
|
||||
ret_2 = np.cos(angle) * np.eye(3)
|
||||
ret_3 = np.sin(angle) * array([[0, -axis[2], axis[1]], [axis[2], 0, -axis[0]],
|
||||
[-axis[1], axis[0], 0]])
|
||||
return ret_1 + ret_2 + ret_3
|
||||
|
||||
|
||||
def ecef_euler_from_ned(ned_ecef_init, ned_pose):
|
||||
'''
|
||||
Got it from here:
|
||||
Using Rotations to Build Aerospace Coordinate Systems
|
||||
-Don Koks
|
||||
'''
|
||||
converter = LocalCoord.from_ecef(ned_ecef_init)
|
||||
x0 = converter.ned2ecef([1, 0, 0]) - converter.ned2ecef([0, 0, 0])
|
||||
y0 = converter.ned2ecef([0, 1, 0]) - converter.ned2ecef([0, 0, 0])
|
||||
z0 = converter.ned2ecef([0, 0, 1]) - converter.ned2ecef([0, 0, 0])
|
||||
|
||||
x1 = rot(z0, ned_pose[2]).dot(x0)
|
||||
y1 = rot(z0, ned_pose[2]).dot(y0)
|
||||
z1 = rot(z0, ned_pose[2]).dot(z0)
|
||||
|
||||
x2 = rot(y1, ned_pose[1]).dot(x1)
|
||||
y2 = rot(y1, ned_pose[1]).dot(y1)
|
||||
z2 = rot(y1, ned_pose[1]).dot(z1)
|
||||
|
||||
x3 = rot(x2, ned_pose[0]).dot(x2)
|
||||
y3 = rot(x2, ned_pose[0]).dot(y2)
|
||||
#z3 = rot(x2, ned_pose[0]).dot(z2)
|
||||
|
||||
x0 = array([1, 0, 0])
|
||||
y0 = array([0, 1, 0])
|
||||
z0 = array([0, 0, 1])
|
||||
|
||||
psi = np.arctan2(inner(x3, y0), inner(x3, x0))
|
||||
theta = np.arctan2(-inner(x3, z0), np.sqrt(inner(x3, x0)**2 + inner(x3, y0)**2))
|
||||
y2 = rot(z0, psi).dot(y0)
|
||||
z2 = rot(y2, theta).dot(z0)
|
||||
phi = np.arctan2(inner(y3, z2), inner(y3, y2))
|
||||
|
||||
ret = array([phi, theta, psi])
|
||||
return ret
|
||||
|
||||
|
||||
def ned_euler_from_ecef(ned_ecef_init, ecef_poses):
|
||||
'''
|
||||
Got the math from here:
|
||||
Using Rotations to Build Aerospace Coordinate Systems
|
||||
-Don Koks
|
||||
|
||||
Also accepts array of ecef_poses and array of ned_ecef_inits.
|
||||
Where each row is a pose and an ecef_init.
|
||||
'''
|
||||
ned_ecef_init = array(ned_ecef_init)
|
||||
ecef_poses = array(ecef_poses)
|
||||
output_shape = ecef_poses.shape
|
||||
ned_ecef_init = np.atleast_2d(ned_ecef_init)
|
||||
if ned_ecef_init.shape[0] == 1:
|
||||
ned_ecef_init = np.tile(ned_ecef_init[0], (output_shape[0], 1))
|
||||
ecef_poses = np.atleast_2d(ecef_poses)
|
||||
|
||||
ned_poses = np.zeros(ecef_poses.shape)
|
||||
for i, ecef_pose in enumerate(ecef_poses):
|
||||
converter = LocalCoord.from_ecef(ned_ecef_init[i])
|
||||
x0 = array([1, 0, 0])
|
||||
y0 = array([0, 1, 0])
|
||||
z0 = array([0, 0, 1])
|
||||
|
||||
x1 = rot(z0, ecef_pose[2]).dot(x0)
|
||||
y1 = rot(z0, ecef_pose[2]).dot(y0)
|
||||
z1 = rot(z0, ecef_pose[2]).dot(z0)
|
||||
|
||||
x2 = rot(y1, ecef_pose[1]).dot(x1)
|
||||
y2 = rot(y1, ecef_pose[1]).dot(y1)
|
||||
z2 = rot(y1, ecef_pose[1]).dot(z1)
|
||||
|
||||
x3 = rot(x2, ecef_pose[0]).dot(x2)
|
||||
y3 = rot(x2, ecef_pose[0]).dot(y2)
|
||||
#z3 = rot(x2, ecef_pose[0]).dot(z2)
|
||||
|
||||
x0 = converter.ned2ecef([1, 0, 0]) - converter.ned2ecef([0, 0, 0])
|
||||
y0 = converter.ned2ecef([0, 1, 0]) - converter.ned2ecef([0, 0, 0])
|
||||
z0 = converter.ned2ecef([0, 0, 1]) - converter.ned2ecef([0, 0, 0])
|
||||
|
||||
psi = np.arctan2(inner(x3, y0), inner(x3, x0))
|
||||
theta = np.arctan2(-inner(x3, z0), np.sqrt(inner(x3, x0)**2 + inner(x3, y0)**2))
|
||||
y2 = rot(z0, psi).dot(y0)
|
||||
z2 = rot(y2, theta).dot(z0)
|
||||
phi = np.arctan2(inner(y3, z2), inner(y3, y2))
|
||||
ned_poses[i] = array([phi, theta, psi])
|
||||
|
||||
return ned_poses.reshape(output_shape)
|
||||
|
||||
|
||||
def ecef2car(car_ecef, psi, theta, points_ecef, ned_converter):
|
||||
"""
|
||||
TODO: add roll rotation
|
||||
Converts an array of points in ecef coordinates into
|
||||
x-forward, y-left, z-up coordinates
|
||||
Parameters
|
||||
----------
|
||||
psi: yaw, radian
|
||||
theta: pitch, radian
|
||||
Returns
|
||||
-------
|
||||
[x, y, z] coordinates in car frame
|
||||
"""
|
||||
|
||||
# input is an array of points in ecef cocrdinates
|
||||
# output is an array of points in car's coordinate (x-front, y-left, z-up)
|
||||
|
||||
# convert points to NED
|
||||
points_ned = []
|
||||
for p in points_ecef:
|
||||
points_ned.append(ned_converter.ecef2ned_matrix.dot(array(p) - car_ecef))
|
||||
|
||||
points_ned = np.vstack(points_ned).T
|
||||
|
||||
# n, e, d -> x, y, z
|
||||
# Calculate relative postions and rotate wrt to heading and pitch of car
|
||||
invert_R = array([[1., 0., 0.], [0., -1., 0.], [0., 0., -1.]])
|
||||
|
||||
c, s = np.cos(psi), np.sin(psi)
|
||||
yaw_R = array([[c, s, 0.], [-s, c, 0.], [0., 0., 1.]])
|
||||
|
||||
c, s = np.cos(theta), np.sin(theta)
|
||||
pitch_R = array([[c, 0., -s], [0., 1., 0.], [s, 0., c]])
|
||||
|
||||
return dot(pitch_R, dot(yaw_R, dot(invert_R, points_ned)))
|
||||
|
|
@ -0,0 +1,122 @@
|
|||
#!/usr/bin/env python3
|
||||
|
||||
import numpy as np
|
||||
import unittest
|
||||
|
||||
import common.transformations.coordinates as coord
|
||||
|
||||
geodetic_positions = np.array([[37.7610403, -122.4778699, 115],
|
||||
[27.4840915, -68.5867592, 2380],
|
||||
[32.4916858, -113.652821, -6],
|
||||
[15.1392514, 103.6976037, 24],
|
||||
[24.2302229, 44.2835412, 1650]])
|
||||
|
||||
geodetic_positions_radians = np.array([[0.65905448, -2.13764209, 115],
|
||||
[0.47968789, -1.19706477, 2380],
|
||||
[0.5670869, -1.98361593, -6],
|
||||
[0.26422978, 1.80986461, 24],
|
||||
[0.42289717, 0.7728936, 1650]])
|
||||
|
||||
ecef_positions = np.array([[-2711076.55270557, -4259167.14692758, 3884579.87669935],
|
||||
[ 2068042.69652729, -5273435.40316622, 2927004.89190746],
|
||||
[-2160412.60461669, -4932588.89873832, 3406542.29652851],
|
||||
[-1458247.92550567, 5983060.87496612, 1654984.6099885 ],
|
||||
[ 4167239.10867871, 4064301.90363223, 2602234.6065749 ]])
|
||||
|
||||
ecef_positions_offset = np.array([[-2711004.46961115, -4259099.33540613, 3884605.16002147],
|
||||
[ 2068074.30639499, -5273413.78835412, 2927012.48741131],
|
||||
[-2160344.53748176, -4932586.20092211, 3406636.2962545 ],
|
||||
[-1458211.98517094, 5983151.11161276, 1655077.02698447],
|
||||
[ 4167271.20055269, 4064398.22619263, 2602238.95265847]])
|
||||
|
||||
|
||||
ned_offsets = np.array([[78.722153649976391, 24.396208657446344, 60.343017506838436],
|
||||
[10.699003365155221, 37.319278617604269, 4.1084100025050407],
|
||||
[95.282646251726959, 61.266689955574428, -25.376506058505054],
|
||||
[68.535769283630003, -56.285970011848889, -100.54840137956515],
|
||||
[-33.066609321880179, 46.549821994306861, -84.062540548335591]])
|
||||
|
||||
ecef_init_batch = np.array([2068042.69652729, -5273435.40316622, 2927004.89190746])
|
||||
ecef_positions_offset_batch = np.array([[ 2068089.41454771, -5273434.46829148, 2927074.04783672],
|
||||
[ 2068103.31628647, -5273393.92275431, 2927102.08725987],
|
||||
[ 2068108.49939636, -5273359.27047121, 2927045.07091581],
|
||||
[ 2068075.12395611, -5273381.69432566, 2927041.08207992],
|
||||
[ 2068060.72033399, -5273430.6061505, 2927094.54928305]])
|
||||
|
||||
ned_offsets_batch = np.array([[ 53.88103168, 43.83445935, -46.27488057],
|
||||
[ 93.83378995, 71.57943024, -30.23113187],
|
||||
[ 57.26725796, 89.05602684, 23.02265814],
|
||||
[ 49.71775195, 49.79767572, 17.15351015],
|
||||
[ 78.56272609, 18.53100158, -43.25290759]])
|
||||
|
||||
|
||||
|
||||
class TestNED(unittest.TestCase):
|
||||
def test_small_distances(self):
|
||||
start_geodetic = np.array([33.8042184, -117.888593, 0.0])
|
||||
local_coord = coord.LocalCoord.from_geodetic(start_geodetic)
|
||||
|
||||
start_ned = local_coord.geodetic2ned(start_geodetic)
|
||||
np.testing.assert_array_equal(start_ned, np.zeros(3,))
|
||||
|
||||
west_geodetic = start_geodetic + [0, -0.0005, 0]
|
||||
west_ned = local_coord.geodetic2ned(west_geodetic)
|
||||
self.assertLess(np.abs(west_ned[0]), 1e-3)
|
||||
self.assertLess(west_ned[1], 0)
|
||||
|
||||
southwest_geodetic = start_geodetic + [-0.0005, -0.002, 0]
|
||||
southwest_ned = local_coord.geodetic2ned(southwest_geodetic)
|
||||
self.assertLess(southwest_ned[0], 0)
|
||||
self.assertLess(southwest_ned[1], 0)
|
||||
|
||||
def test_ecef_geodetic(self):
|
||||
# testing single
|
||||
np.testing.assert_allclose(ecef_positions[0], coord.geodetic2ecef(geodetic_positions[0]), rtol=1e-9)
|
||||
np.testing.assert_allclose(geodetic_positions[0,:2], coord.ecef2geodetic(ecef_positions[0])[:2], rtol=1e-9)
|
||||
np.testing.assert_allclose(geodetic_positions[0,2], coord.ecef2geodetic(ecef_positions[0])[2], rtol=1e-9, atol=1e-4)
|
||||
|
||||
np.testing.assert_allclose(geodetic_positions[:,:2], coord.ecef2geodetic(ecef_positions)[:,:2], rtol=1e-9)
|
||||
np.testing.assert_allclose(geodetic_positions[:,2], coord.ecef2geodetic(ecef_positions)[:,2], rtol=1e-9, atol=1e-4)
|
||||
np.testing.assert_allclose(ecef_positions, coord.geodetic2ecef(geodetic_positions), rtol=1e-9)
|
||||
|
||||
np.testing.assert_allclose(geodetic_positions_radians[0], coord.ecef2geodetic(ecef_positions[0], radians=True), rtol=1e-5)
|
||||
np.testing.assert_allclose(geodetic_positions_radians[:,:2], coord.ecef2geodetic(ecef_positions, radians=True)[:,:2], rtol=1e-7)
|
||||
np.testing.assert_allclose(geodetic_positions_radians[:,2], coord.ecef2geodetic(ecef_positions, radians=True)[:,2], rtol=1e-7, atol=1e-4)
|
||||
|
||||
|
||||
|
||||
def test_ned(self):
|
||||
for ecef_pos in ecef_positions:
|
||||
converter = coord.LocalCoord.from_ecef(ecef_pos)
|
||||
ecef_pos_moved = ecef_pos + [25, -25, 25]
|
||||
ecef_pos_moved_double_converted = converter.ned2ecef(converter.ecef2ned(ecef_pos_moved))
|
||||
np.testing.assert_allclose(ecef_pos_moved, ecef_pos_moved_double_converted, rtol=1e-9)
|
||||
|
||||
for geo_pos in geodetic_positions:
|
||||
converter = coord.LocalCoord.from_geodetic(geo_pos)
|
||||
geo_pos_moved = geo_pos + np.array([0, 0, 10])
|
||||
geo_pos_double_converted_moved = converter.ned2geodetic(converter.geodetic2ned(geo_pos) + np.array([0,0,-10]))
|
||||
np.testing.assert_allclose(geo_pos_moved[:2], geo_pos_double_converted_moved[:2], rtol=1e-9, atol=1e-6)
|
||||
np.testing.assert_allclose(geo_pos_moved[2], geo_pos_double_converted_moved[2], rtol=1e-9, atol=1e-4)
|
||||
|
||||
|
||||
def test_ned_saved_results(self):
|
||||
for i, ecef_pos in enumerate(ecef_positions):
|
||||
converter = coord.LocalCoord.from_ecef(ecef_pos)
|
||||
np.testing.assert_allclose(converter.ned2ecef(ned_offsets[i]),
|
||||
ecef_positions_offset[i],
|
||||
rtol=1e-9, atol=1e-4)
|
||||
np.testing.assert_allclose(converter.ecef2ned(ecef_positions_offset[i]),
|
||||
ned_offsets[i],
|
||||
rtol=1e-9, atol=1e-4)
|
||||
|
||||
def test_ned_batch(self):
|
||||
converter = coord.LocalCoord.from_ecef(ecef_init_batch)
|
||||
np.testing.assert_allclose(converter.ecef2ned(ecef_positions_offset_batch),
|
||||
ned_offsets_batch,
|
||||
rtol=1e-9, atol=1e-7)
|
||||
np.testing.assert_allclose(converter.ned2ecef(ned_offsets_batch),
|
||||
ecef_positions_offset_batch,
|
||||
rtol=1e-9, atol=1e-7)
|
||||
if __name__ == "__main__":
|
||||
unittest.main()
|
||||
|
|
@ -0,0 +1,69 @@
|
|||
#!/usr/bin/env python3
|
||||
|
||||
import numpy as np
|
||||
import unittest
|
||||
|
||||
from common.transformations.orientation import euler2quat, quat2euler, euler2rot, rot2euler, \
|
||||
rot2quat, quat2rot, \
|
||||
ned_euler_from_ecef
|
||||
|
||||
eulers = np.array([[ 1.46520501, 2.78688383, 2.92780854],
|
||||
[ 4.86909526, 3.60618161, 4.30648981],
|
||||
[ 3.72175965, 2.68763705, 5.43895988],
|
||||
[ 5.92306687, 5.69573614, 0.81100357],
|
||||
[ 0.67838374, 5.02402037, 2.47106426]])
|
||||
|
||||
quats = np.array([[ 0.66855182, -0.71500939, 0.19539353, 0.06017818],
|
||||
[ 0.43163717, 0.70013301, 0.28209145, 0.49389021],
|
||||
[ 0.44121991, -0.08252646, 0.34257534, 0.82532207],
|
||||
[ 0.88578382, -0.04515356, -0.32936046, 0.32383617],
|
||||
[ 0.06578165, 0.61282835, 0.07126891, 0.78424163]])
|
||||
|
||||
ecef_positions = np.array([[-2711076.55270557, -4259167.14692758, 3884579.87669935],
|
||||
[ 2068042.69652729, -5273435.40316622, 2927004.89190746],
|
||||
[-2160412.60461669, -4932588.89873832, 3406542.29652851],
|
||||
[-1458247.92550567, 5983060.87496612, 1654984.6099885 ],
|
||||
[ 4167239.10867871, 4064301.90363223, 2602234.6065749 ]])
|
||||
|
||||
ned_eulers = np.array([[ 0.46806039, -0.4881889 , 1.65697808],
|
||||
[-2.14525969, -0.36533066, 0.73813479],
|
||||
[-1.39523364, -0.58540761, -1.77376356],
|
||||
[-1.84220435, 0.61828016, -1.03310421],
|
||||
[ 2.50450101, 0.36304151, 0.33136365]])
|
||||
|
||||
|
||||
class TestOrientation(unittest.TestCase):
|
||||
def test_quat_euler(self):
|
||||
for i, eul in enumerate(eulers):
|
||||
np.testing.assert_allclose(quats[i], euler2quat(eul), rtol=1e-7)
|
||||
np.testing.assert_allclose(quats[i], euler2quat(quat2euler(quats[i])), rtol=1e-6)
|
||||
for i, eul in enumerate(eulers):
|
||||
np.testing.assert_allclose(quats[i], euler2quat(list(eul)), rtol=1e-7)
|
||||
np.testing.assert_allclose(quats[i], euler2quat(quat2euler(list(quats[i]))), rtol=1e-6)
|
||||
np.testing.assert_allclose(quats, euler2quat(eulers), rtol=1e-7)
|
||||
np.testing.assert_allclose(quats, euler2quat(quat2euler(quats)), rtol=1e-6)
|
||||
|
||||
def test_rot_euler(self):
|
||||
for eul in eulers:
|
||||
np.testing.assert_allclose(euler2quat(eul), euler2quat(rot2euler(euler2rot(eul))), rtol=1e-7)
|
||||
for eul in eulers:
|
||||
np.testing.assert_allclose(euler2quat(eul), euler2quat(rot2euler(euler2rot(list(eul)))), rtol=1e-7)
|
||||
np.testing.assert_allclose(euler2quat(eulers), euler2quat(rot2euler(euler2rot(eulers))), rtol=1e-7)
|
||||
|
||||
def test_rot_quat(self):
|
||||
for quat in quats:
|
||||
np.testing.assert_allclose(quat, rot2quat(quat2rot(quat)), rtol=1e-7)
|
||||
for quat in quats:
|
||||
np.testing.assert_allclose(quat, rot2quat(quat2rot(list(quat))), rtol=1e-7)
|
||||
np.testing.assert_allclose(quats, rot2quat(quat2rot(quats)), rtol=1e-7)
|
||||
|
||||
def test_euler_ned(self):
|
||||
for i in range(len(eulers)):
|
||||
np.testing.assert_allclose(ned_eulers[i], ned_euler_from_ecef(ecef_positions[i], eulers[i]), rtol=1e-7)
|
||||
#np.testing.assert_allclose(eulers[i], ecef_euler_from_ned(ecef_positions[i], ned_eulers[i]), rtol=1e-7)
|
||||
np.testing.assert_allclose(ned_eulers, ned_euler_from_ecef(ecef_positions, eulers), rtol=1e-7)
|
||||
|
||||
|
||||
|
||||
if __name__ == "__main__":
|
||||
unittest.main()
|
||||
|
|
@ -0,0 +1,40 @@
|
|||
import sys
|
||||
import pygame
|
||||
from pygame.locals import *
|
||||
|
||||
class Window():
|
||||
def __init__(self, w, h, caption="window", double=False):
|
||||
self.w = w
|
||||
self.h = h
|
||||
pygame.init()
|
||||
pygame.display.set_caption(caption)
|
||||
self.double = double
|
||||
if self.double:
|
||||
self.screen = pygame.display.set_mode((w*2,h*2), pygame.DOUBLEBUF)
|
||||
else:
|
||||
self.screen = pygame.display.set_mode((w,h), pygame.DOUBLEBUF)
|
||||
self.camera_surface = pygame.surface.Surface((w,h), 0, 24).convert()
|
||||
|
||||
def draw(self, out):
|
||||
pygame.surfarray.blit_array(self.camera_surface, out.swapaxes(0,1))
|
||||
if self.double:
|
||||
camera_surface_2x = pygame.transform.scale2x(self.camera_surface)
|
||||
self.screen.blit(camera_surface_2x, (0, 0))
|
||||
else:
|
||||
self.screen.blit(self.camera_surface, (0, 0))
|
||||
pygame.display.flip()
|
||||
|
||||
def getkey(self):
|
||||
while 1:
|
||||
event = pygame.event.wait()
|
||||
if event.type == QUIT:
|
||||
pygame.quit()
|
||||
sys.exit()
|
||||
if event.type == KEYDOWN:
|
||||
return event.key
|
||||
|
||||
def getclick(self):
|
||||
for event in pygame.event.get():
|
||||
if event.type == pygame.MOUSEBUTTONDOWN:
|
||||
mx, my = pygame.mouse.get_pos()
|
||||
return mx, my
|
||||
Loading…
Reference in New Issue